
29.人間工学
章の編集者: ヴォルフガング・ローリグとヨアヒム・ヴェダー
目次
表と図
概要
ヴォルフガング・ローリグとヨアヒム・ヴェダー
目標、原則および方法
人間工学の性質と目的
ウィリアム・T・シングルトン
活動、タスク、および作業システムの分析
ヴェロニク・デ・カイザー
人間工学と標準化
フリードヘルム・ナクライナー
チェックリスト
プラナブ クマール ナグ
物理的および生理学的側面
人体計測
メルキオーレ・マサリ
筋肉の仕事
ジュハニ・スモランダーとヴェイッコ・ロウヘヴァーラ
職場での姿勢
イルッカ・クオリンカ
生体力学
フランク・ダービー
一般的な疲労
エティエンヌ・グランジャン
疲労回復
Rolf Helbig と Walter Rohmert
心理的側面
メンタルワークロード
ウィンフリード・ハッカー
警戒
ハーバート・ホイヤー
精神疲労
ピーター・リヒター
仕事の組織的側面
作業組織
エバーハルト・ウーリッヒとグデラ・グローテ
睡眠不足
小木一貴
作業システムの設計
ワークステーション
ローランド・カデフォス
ツール
TM フレイザー
コントロール、インジケーター、パネル
カール HE クローマー
情報処理とデザイン
アンドリーズ・F・サンダース
すべての人のためのデザイン
特定のグループ向けの設計
ジョーク・H・グラディ=ヴァン・デン・ニューボーア
文化の違い
ホウシャン・シャナヴァズ
高齢労働者
アントワーヌ・ラヴィルとセルジュ・ヴォルコフ
特別なニーズを持つ労働者
ジョーク・H・グラディ=ヴァン・デン・ニューボーア
人間工学の多様性と重要性 -- XNUMX つの例
ダイヤモンド製造におけるシステム設計
イッサカル・ギラド
人間工学的設計原則の無視: チェルノブイリ
ウラジミール・M・ムニポフ
テーブル類
記事のコンテキストで表を表示するには、下のリンクをクリックしてください.
3. ひずみに対する XNUMX つの応力因子の組み合わせ効果の規則
6. 組織的文脈への参加
8. 不規則勤務と睡眠不足
12. コントロール配置のルール
13. ラベルのガイドライン
フィギュア
サムネイルをポイントすると、図のキャプションが表示されます。クリックすると、記事のコンテキストで図が表示されます.




















































子供のカテゴリ

作業組織
生産システムの設計
多くの企業は、コンピューターでサポートされた生産システムに何百万ドルも投資していると同時に、トレーニングへの投資によって価値を大幅に高めることができる人材を十分に活用していません。 実際、非常に複雑な自動化の代わりに資格のある従業員の可能性を利用すると、特定の状況では投資コストを大幅に削減できるだけでなく、柔軟性とシステム機能を大幅に向上させることもできます。
テクノロジーの非効率的な使用の原因
現代のテクノロジーへの投資が意図している改善は、多くの場合、ほとんど達成されていません (Strohm, Kuark and Schilling 1993; Ulich 1994)。 その最大の理由は、技術、組織、従業員の資質の問題です。
テクノロジーの問題については、主に XNUMX つの原因を特定できます。
- 技術不足. 技術の変化が速いため、市場に出回っている新しい技術は、継続的なユーザビリティ テストが不十分な場合があり、予期しないダウンタイムが発生する可能性があります。
- 不適切な技術. 大企業向けに開発されたテクノロジーは、多くの場合、小規模企業には適していません。 大企業向けに開発された生産計画および制御システムを小規模企業が導入すると、成功や存続に必要な柔軟性が失われる可能性があります。
- 過度に複雑なテクノロジー. 設計者と開発者が計画の知識全体を使用して、生産に携わる人々の経験を考慮せずに技術的に実現可能なものを実現すると、その結果、マスターするのが容易ではない複雑な自動化システムになる可能性があります。
組織の問題は主に、最新のテクノロジーを不適切な組織構造に実装しようとする継続的な試みに起因します。 たとえば、第 1988 世代、第 XNUMX 世代、第 XNUMX 世代のコンピューターを第 XNUMX 世代の組織に導入することはほとんど意味がありません。 しかし、これはまさに多くの企業が行っていることです (Savage and Appleton XNUMX)。 多くの企業では、組織の抜本的な再構築が、新しいテクノロジーの使用を成功させるための前提条件となっています。 これには特に、生産計画と管理の概念の調査が含まれます。 最終的に、資格のあるオペレーターによるローカル セルフ コントロールは、特定の状況では、技術的に高度に開発された生産計画および制御システムよりもはるかに効率的で経済的です。
従業員の資格に関する問題は、コンピュータを利用した生産システムの導入に伴う資格対策の必要性を多くの企業が認識していないことが主な原因です。 さらに、トレーニングは、戦略的な投資ではなく、管理および最小化すべきコスト要因と見なされることが多すぎます。 実際、オペレータの能力とシステム固有の知識と経験に基づいて障害を診断し、修復できるようにすることで、システムのダウンタイムとそれに伴うコストを効果的に削減できることがよくあります。 これは、密結合された生産施設で特に当てはまります (Köhler et al. 1989)。 同じことが、新製品または製品バリエーションの導入にも当てはまります。 非効率な過剰なテクノロジーの使用の多くの例は、そのような関係を証明しています。
ここで簡単に説明した分析の結果は、コンピューター支援の生産システムの導入は、技術の使用、組織の構造、およびスタッフの資格の向上を共同で最適化しようとする全体的な概念に統合された場合にのみ、成功を約束するということです。 .
タスクから社会技術システムの設計まで
生産設計の仕事関連の心理的概念は、 優位性
タスク. 一方で、タスクは個人と組織の間のインターフェースを形成します (Volpert 1987)。 一方、タスクは社会的サブシステムを技術的サブシステムと結び付けます。 「タスクは、社会システムと技術システムをつなぐ点でなければなりません。つまり、技術システム内の仕事を、社会システム内の関連する役割行動と結び付けます」(Blumberg 1988)。
これは、たとえば生産島などの社会技術システムは、主に実行する必要があるタスクによって定義されることを意味します。 人間と機械の間の仕事の配分は中心的な役割を果たします。それは、人が自動化の「ギャップ」に残された機能を持つ機械の長腕として「機能」するか、それとも機械が機械の長腕として機能するかを決定するからです。人間の能力と能力をサポートするツール機能を備えています。 私たちは、これらの相反する立場を「技術志向」と「仕事志向」と呼んでいます (Ulich 1994)。
完全なタスクの概念
完全活動の原則 (ハッカー 1986) または タスクを完了する 仕事のタスクを定義し、人間と機械の間でタスクを分割するための仕事関連の心理的概念において中心的な役割を果たします。 完全なタスクとは、「個人がかなりの個人的なコントロールを持っている」ものであり、「それらを完了または継続するように個人の中に強い力を誘発する」ものです。 完全なタスクは、「『タスク指向』として説明されているものの開発、つまり、個人の関心がタスクの性質によって喚起され、関与し、指示される状況」に貢献します (Emery 1959)。 . 図 1 は、生産システムの作業指向設計に向けた対策で考慮する必要がある完全性の特性をまとめたものです。
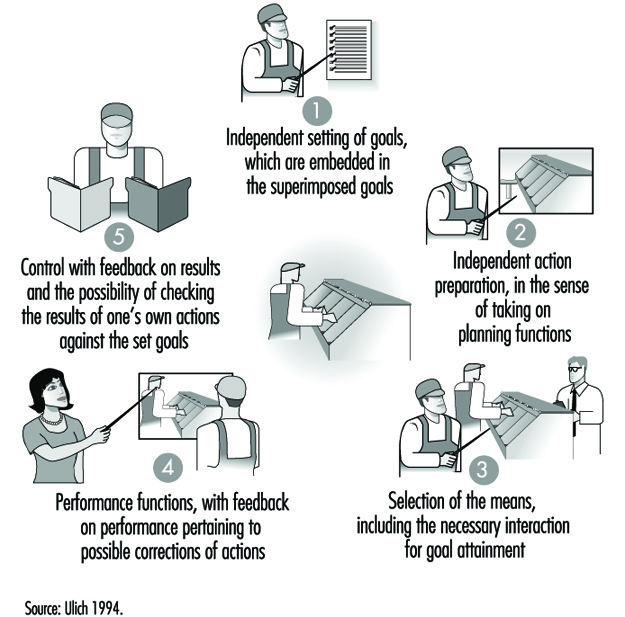
- 高次の目標に組み込むことができる目標の独立した設定には、中央の計画と管理から離れて、定義された期間内に自己決定的な決定を下す可能性を提供する分散型の製造現場管理を支持する必要があります。
- 計画機能を実行するという意味で、アクションの自己決定的な準備には、製造現場での作業準備タスクの統合が必要です。
- 方法の選択とは、たとえば、設計者が自動システム (CAD アプリケーションなど) の代わりに製図板を使用して特定のサブタスクを実行するかどうかを決定できるようにすることを意味します。のプロセスがシステムに入力されます。
- カプセル化された作業プロセス「プロセスへのウィンドウ」の場合に必要なアクションを修正するためのプロセス フィードバックを備えたパフォーマンス機能は、プロセス距離を最小限に抑えるのに役立ちます。
- 結果のフィードバックによるアクション制御とは、製造現場の作業員が品質検査と管理の機能を担うことを意味します。
完全な課題の原則を実現することから生じる結果のこれらの兆候は、1 つのことを明確にします。結果として生じる複雑さと関連する範囲の説明。 (1) 作業タスクの再構築は、特にそれがグループワークの導入に関連している場合には、会社のすべてのレベルをカバーする包括的な再構築の概念にそれらを統合する必要があります。
さまざまなレベルに適用される構造上の原則を表 1 にまとめます。
表 1. 生産構造化のための作業指向の原則
|
組織レベル |
構造原理 |
|
会社概要 |
地方分権化 |
|
組織単位 |
機能統合 |
|
グループ |
自己規制1 |
|
個々の |
熟練した制作作業1 |
1 差分作業設計の原則を考慮に入れる。
出典: Ulich 1994.
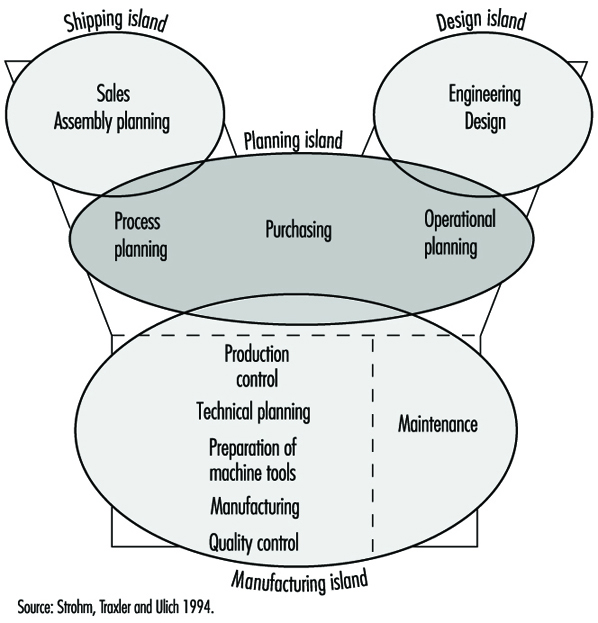
表 1 に概説されている生産構造化の原則を実現する可能性は、図 2 に示されている生産会社の再編の提案によって示されています。再編はまた、テイラー主義的な労働と権力の分割の概念からの根本的な転換を示しています。 多くの企業の例は、そのようなモデルに基づく仕事と組織の構造の再構築が、健康と人格の発達を促進する仕事の心理的基準と長期的な経済効率の要求の両方を満たすことができることを示しています (Ulich 1994 を参照)。
ここで支持されている論拠は、紙面の都合上非常に簡単に概説しただけですが、次の XNUMX つのことを明確にしようとしています。
- ここで言及されているような概念は、ウォマック、ジョーンズ、ルース (1990) によって説明された意味での「リーン生産」に代わるものです。 後者のアプローチでは「あらゆる自由空間が取り除かれ」、テーラーリスティックな意味での作業活動の極端な細分化が維持されますが、このページで進められているアプローチでは、グループでのタスクの完了と幅広い自己調整が中心的な役割を果たします。 .
- 熟練労働者の古典的なキャリアパスは変更され、場合によっては、機能統合の原則の必要な実現によって排除されます。つまり、製造現場での作業の準備など、間接的に生産的な機能として知られているものを製造現場に再統合することです。 、メンテナンス、品質管理など。 これには、従来のキャリア文化をコンピテンシー文化に置き換えるという意味での根本的な方向転換が必要です。
- ここで言及されているような概念は、企業の権力構造の根本的な変化を意味し、それに対応する参加の可能性の開発において対応するものを見つけなければなりません。
労働者の参加
前のセクションでは、基本的な特徴の XNUMX つとして、組織のヒエラルキーの下位レベルでの民主化を、作業内容に関する自律性と決定の自由度の向上、および製造現場での労働条件を有するタイプの作業組織について説明しました。 このセクションでは、一般的な参加型意思決定に注目することで、民主化に別の角度からアプローチします。 最初に、参加の定義的枠組みが提示され、続いて参加の効果に関する研究が議論されます。 最後に、参加型システムの設計について詳しく説明します。
参加の定義フレームワーク
組織開発、リーダーシップ、システム設計、および労使関係は、参加が関連すると見なされるさまざまなタスクとコンテキストの例です。 参加の中核と見なすことができる共通点は、個人やグループが、特定の状況での代替行動の選択に影響を与えることによって、自分たちの利益を促進する機会です (Wilpert 1989)。 ただし、参加をより詳細に説明するには、いくつかの次元が必要です。 頻繁に示唆される次元は、(a) 公式-非公式、(b) 直接-間接、(c) 影響度、および (d) 決定の内容である (例えば、Dachler and Wilpert 1978; Locke and Schweiger 1979)。 正式な参加とは、法的またはその他の規定されたルール (交渉手順、プロジェクト管理のガイドラインなど) 内での参加を指し、非公式な参加は、上司と部下の間など、規定されていないやり取りに基づくものです。 直接参加は、関係する個人による直接的な影響を可能にしますが、間接参加は代表のシステムを通じて機能します。 影響度は通常、「従業員への決定に関する情報なし」から「従業員への事前情報」および「従業員との協議」から「関係者全員の共通の決定」までの範囲の尺度で表されます。 協議や共通の意思決定なしに事前情報を提供することに関して、何人かの著者は、これは参加のレベルが低いのではなく、単に「疑似参加」の一形態であると主張します (Wall and Lischeron 1977)。 最後に、参加型意思決定の内容領域を指定できます。たとえば、技術的または組織的な変更、労使関係、または日々の運用上の決定などです。
Hornby と Clegg (1992) は、これまでに提示された次元から導き出されたものとはまったく異なる分類スキームを開発しました。 Wall と Lischeron (1977) の研究に基づいて、彼らは参加プロセスの XNUMX つの側面を区別しています。
- 意思決定に関与する当事者間の相互作用のタイプとレベル
- 参加者間の情報の流れ
- 当事者が互いに及ぼす影響の性質と程度。
次に、これらの側面を使用して、Gowler and Legge (1978) によって提案されたフレームワークを補完しました。このフレームワークでは、参加を 2 つの組織変数、つまり構造のタイプ (機械的対有機的) とプロセスのタイプ (安定対不安定) の関数として説明しています。 このモデルには、参加と組織との関係に関する多くの仮定が含まれているため、参加の一般的なタイプを分類するために使用することはできません。 ここでは、参加をより広い文脈で定義するための 1992 つの試みとして提示されています (表 XNUMX を参照)。 (この記事の最後のセクションでは、Hornby と Clegg の研究 (XNUMX 年) について説明します。これも、モデルの仮定をテストすることを目的としています。)
表 2. 組織のコンテキストへの参加
|
組織構造 |
||
|
メカニズム |
オーガニック |
|
|
組織プロセス |
||
|
安定した |
規制 |
Open |
|
不安定な |
任意 |
規制 |
出典:Hornby and Clegg 1992 から改作。
通常、参加の分類に含まれない重要な側面は、参加戦略の選択の背後にある組織の目標です (Dachler and Wilpert 1978)。 最も基本的には、参加は、意思決定プロセスの有効性や意思決定の結果と実施の質への影響に関係なく、民主的な規範を遵守するために行うことができます。 一方、参加型手続きは、関与する個人の知識と経験から利益を得るため、または決定の受け入れを確実にするために選択することができます。 多くの場合、意思決定への参加型アプローチの選択の背後にある目的を特定することは困難であり、多くの場合、同時にいくつかの目的が見つかるため、この次元を参加の分類に簡単に使用することはできません。 ただし、参加プロセスを理解するためには、心に留めておくべき重要な側面です。
参加の効果に関する研究
意思決定に直接参加する機会を提供することで、満足度と生産性の向上を達成できるという仮説が広く共有されています。 全体として、研究はこの仮定を支持していますが、証拠は明確ではなく、研究の多くは理論的および方法論的な理由で批判されています (Cotton et al. 1988; Locke and Schweiger 1979; Wall and Lischeron 1977)。 コットン等。 ( 1988 ) 一貫性のない調査結果は、研究された参加の形態の違いによるものであると主張しました。 たとえば、非公式の参加と従業員の所有権は高い生産性と満足度に関連していますが、短期的な参加は両方の点で効果がありません。 彼らの結論は強く批判されたが (Leana, Locke and Schweiger 1990)、参加研究は一般に、Cotton らによって言及されたような概念上の問題に至るまで、多くの欠陥によって特徴付けられるという合意がある。 (1988) 従属変数の異なる操作化に基づく結果の変動などの方法論的問題 (例えば、Wagner and Gooding 1987)。
参加型研究の難しさを例証するために、Coch と French (1948) による古典的な研究を簡単に説明し、続いて Bartlem と Locke (1981) の批判を示します。 前者の研究の焦点は、参加によって変化への抵抗を克服することでした。 作業タスク間の頻繁な移動が発生する繊維工場のオペレーターには、さまざまな程度で新しいジョブの設計に参加する機会が与えられました。 オペレーターの XNUMX つのグループは、選択された代表者、つまりグループの複数のオペレーターを通じて、決定 (新しい仕事と出来高の詳細な作業手順) に参加しました。 XNUMX つの小さなグループでは、すべてのオペレーターがこれらの決定に参加し、XNUMX 番目のグループは参加が許可されていないコントロールとして機能しました。 工場では以前、ほとんどのオペレーターが転勤を嫌がり、工場で最初の仕事を覚えるよりも新しい仕事を再学習するのが遅く、転勤したオペレーターの欠勤と離職率は、最近転勤していないオペレーターよりも高いことがわかっていました。
これは、新しい仕事への転勤後のできごとの収入の初期損失を補うために、転勤ボーナスが与えられたという事実にもかかわらず発生しました。 17 つの実験条件を比較すると、非参加群は移行後最初の 1951 か月間、群の標準として設定された生産量の低いレベルにとどまり、完全参加群は元の生産性に回復したことがわかりました。数日以内にそれを超え、月末にはそれを超えました。 代表者を選んで参加した XNUMX 番目のグループは、それほど早くは回復しませんでしたが、XNUMX か月後には以前の生産性を示しました。 (ただし、最初の XNUMX 週間は作業するための資料が不十分でした。) 参加したグループでは入れ替わりが発生せず、管理に対する攻撃性はほとんど観察されませんでした。 参加なしの参加グループの離職率は XNUMX% であり、経営陣に対する態度は総じて敵対的でした。 参加しなかったグループは、XNUMX か月後に解散し、さらに XNUMX か月半後に再結成され、新しい仕事に取り組み、今回は彼らの仕事の設計に参加する機会が与えられました。 その後、彼らは最初の実験に参加したグループと同じパターンの回復と生産性の向上を示しました。 この結果は、Lewin (XNUMX 年、以下を参照) の研究から導き出された変化に対する抵抗の一般的なモデルに基づいて、Coch と French によって説明されました。
Bartlem と Locke (1981) は、これらの調査結果は参加のプラスの効果を支持するものとして解釈することはできないと主張した。出来高率、利用可能な作業量、およびグループサイズを設定するために実行された時間調査の方法。 彼らは、参加ではなく、報酬率の公正さと経営陣に対する一般的な信頼が、参加グループのより良いパフォーマンスに貢献していると仮定しました。 それ自体が.
参加の効果に関する研究に関連する問題に加えて、これらの効果につながるプロセスについてはほとんどわかっていません (例: Wilpert 1989)。 Baitsch (1985) は、参加型ジョブ デザインの効果に関する縦断的研究で、多くの製造現場従業員の能力開発プロセスを詳細に説明しました。 彼の研究は、Deci (1975) の有能で自己決定的であることの必要性に基づく内発的動機付けの理論にリンクすることができます。 参加が変化への抵抗に及ぼす影響に焦点を当てた理論的枠組みは、Lewin (1951) によって提案された. Lewin (XNUMX) は、社会システムは変化の試みによって乱される準定常均衡を獲得すると主張した. 変化を成功させるためには、変化を支持する力が抵抗する力よりも強くなければなりません。 参加することで、抵抗する力を減らすだけでなく、推進力を高めることができます。なぜなら、抵抗の理由を率直に議論して対処することができ、個々の懸念やニーズを提案された変更に統合できるからです。 さらに、Lewin は、参加型の変更プロセスから生じる共通の決定が、変更の動機と実際の行動の変更との間のリンクを提供すると仮定しました。
システム設計への参加
完全に一貫しているとは言えませんが、参加の有効性に対する経験的な支持、および産業民主主義におけるその倫理的基盤を考えると、システム設計の目的のために参加戦略に従うべきであるという広範な合意があります (Greenbaum and Kyng 1991; Majchrzak 1988; Scarbrough および Corbett 1992)。 さらに、参加型デザイン プロセスに関する多くのケース スタディでは、システム デザインへの参加の特定の利点が実証されています。たとえば、結果として得られるデザインの品質、ユーザーの満足度、および新しいシステムの受け入れ (つまり、実際の使用) に関してです (Mumford Henshall 1979; Spinas 1989; Ulich et al. 1991)。
重要な問題は、参加するかどうかではなく、どのように参加するかです。 Scarbrough と Corbett (1992) は、設計プロセスのさまざまな段階におけるさまざまなタイプの参加の概要を示しました (表 3 を参照)。 彼らが指摘しているように、テクノロジーの実際の設計へのユーザーの関与はかなりまれであり、多くの場合、情報の配布を超えることはありません。 参加は主に、技術システムの実装と最適化の後期段階、および社会技術設計オプションの開発中に発生します。つまり、技術システムの使用オプションと組み合わせた組織およびジョブ設計のオプションです。
表 3. テクノロジー プロセスへのユーザーの参加
|
参加の種類 |
||
|
技術プロセスのフェーズ |
正式な |
非公式 |
|
設計 |
労働組合の相談 |
ユーザーの再設計 |
|
製品の導入 |
新しい技術協定 |
スキル交渉 |
|
|
ジョブデザイン |
非公式の仕事の再設計 |
Scarbrough and Corbett 1992 から適応。
技術システムの設計にユーザーが関与することや、企業の正式な参加構造に組み込まれた潜在的な制限に対する管理者やエンジニアの抵抗に加えて、重要な問題は、まだ実装されていないシステムの議論と評価を可能にする方法の必要性に関するものです。存在する (Grote 1994)。 ソフトウェア開発において、ユーザビリティ ラボは、将来のユーザーが早期にテストする機会を提供するため、この困難を克服するのに役立ちます。
参加プロセスを含むシステム設計のプロセスを検討する際に、Hirschheim と Klein (1989) は、社会組織の性質、技術の性質、およびそれらの性質などの基本的なトピックについて、システム開発者と管理者の暗黙的および明示的な仮定の影響を強調しました。開発プロセスにおける自分の役割。 システム設計者が自分自身を専門家と見なすか、促進者と見なすか、解放者と見なすかは、設計と実装のプロセスに大きな影響を与えます。 また、前述のように、参加型デザインが行われるより広範な組織の状況を考慮に入れる必要があります。 Hornby と Clegg (1992) は、一般的な組織の特徴と選択された参加の形式 (または、より正確には、システムの設計と実装の過程で進化する形式) との関係についていくつかの証拠を提供しました。 彼らは、参加型プロジェクト構造の中で実行され、ユーザーの参加を明示的に約束する情報システムの導入を研究しました。 しかし、ユーザーは、行われるはずの変更についてほとんど情報を持っておらず、システム設計およびジョブ設計やジョブ セキュリティなどの関連する質問に対する影響力が低いと報告しています。 この発見は、望ましいオープンな参加ではなく、「恣意的な」参加を助長する組織の機械的構造と不安定なプロセスの観点から解釈されました(表2を参照)。
結論として、参加型変革戦略の利点を示す十分な証拠があります。 ただし、これらのプラスの効果をもたらす、緩和する、または防止する根本的なプロセスと影響要因については、まだ多くを学ぶ必要があります。
ケーススタディ:人の機能制限の国際分類
WHO (世界保健機関) は、1980 年に人の機能制限の分類を導入しました。 ICIDH (International Classification Impairment, Disability and Handicap)。 この分類では、病気、制限、ハンディキャップが区別されます。
この参照モデルは、国際的なコミュニケーションを促進するために作成されました。 このモデルは、一方では政策立案者に参照フレームワークを提供するために提示され、他方では病気の結果に苦しんでいる人々を診断する医師に参照フレームワークを提供するために提示されました。
なぜこの参照フレームワークなのか? それは、長期的に限られた能力を持つ人々の参加を改善し、増加させることを目的として発生しました. 次の XNUMX つの目的が挙げられます。
- リハビリテーションの観点、つまり人々の社会への再統合、これが仕事、学校、家庭などを意味するかどうか.
- 病気の予防、および可能な場合は障害やハンディキャップなどの病気の結果。
1 年 1994 月 5 日現在、分類は公式です。 その後の活動は広範囲にわたり、特に次のような問題に関係しています。特定のグループのための情報と教育措置。 労働者保護のための規則; または、たとえば、企業が障害のある労働者の少なくとも XNUMX% を雇用することを要求しています。 分類自体は、長期的には統合と非差別につながります。
病気
病気は私たち一人一人を襲います。 予防できる病気もあれば、予防できない病気もあります。 治せる病気もあれば、治らない病気もあります。 可能であれば病気を予防し、可能であれば治す必要があります。
減損
障害とは、心理的、生理学的、または解剖学的構造または機能のすべての欠如または異常を意味します。
生まれつき指が XNUMX 本ではなく XNUMX 本であっても、必ずしも障害につながるわけではありません。 個人の能力と、XNUMX 本の指で可能な操作の程度によって、その人が障害を持っているかどうかが決まります。 しかし、脳の中枢レベルでかなりの量の信号処理が不可能な場合、現在のところ患者にとってこの問題を「治す」(解決する) 方法がないため、機能障害は確実に身体障害につながります。
身体障害
障害とは、椅子から立ち上がるのが難しいなど、課題遂行が困難な個人の機能レベルを表します。 これらの困難は、もちろん機能障害に関連していますが、それを取り巻く状況にも関連しています。 車椅子を使用し、オランダのような平らな国に住んでいる人は、チベットのような山岳地帯に住んでいる同じ人よりも、自力で移動する可能性が高くなります.
ハンディキャップ
問題がハンディキャップレベルに置かれると、主要な問題がどの分野で有効であるか、たとえば、不動または身体的依存が有効であるかを判断できます。 これらは仕事のパフォーマンスに影響を与える可能性があります。 たとえば、その人は自分で仕事をすることができないかもしれません。 または、職場に入ると、個人衛生などの支援が必要になる場合があります。
ハンディキャップは、障害の負の結果を示しており、負の結果を取り除くことによってのみ解決できます。
まとめと結論
上記の分類とそのポリシーは、明確に定義された国際的に実行可能な枠組みを提供します。 特定のグループ向けのデザインに関する議論には、私たちの活動を定義し、これらの考えをデザインに実装しようとするために、そのようなフレームワークが必要です。
睡眠不足
健康な人は、毎日数時間睡眠をとっています。 通常、彼らは夜間に眠ります。 彼らは、普段寝ている真夜中から早朝までの時間帯に起きていることが最も難しいと感じています。 個人がこれらの時間帯に完全にまたは部分的に起きていなければならない場合、その個人は強制的な睡眠喪失の状態になります。 睡眠不足、それは通常、疲労として認識されます。 変動する程度の眠気を伴う睡眠の必要性が感じられ、十分な睡眠が取られるまで続きます。 これが、睡眠不足の期間が人を苦しめるとよく言われる理由です。 睡眠不足 or 寝不足.
睡眠不足は、仕事のスケジュール (例えば、夜勤) のために十分な睡眠時間をとれない労働者や、さらに言えば、自由時間の活動が長引く労働者にとって特に問題となります。 夜勤の労働者は、シフトの終わりに睡眠時間の機会が得られるまで、睡眠不足のままです。 通常、日中の睡眠は必要以上に短いため、労働者は、おそらく夜の睡眠である可能性が高い長い睡眠時間が取られるまで、睡眠不足の状態から十分に回復できません。 それまでは睡眠不足が蓄積されます。 (同様の条件—時差ぼけ—時差が数時間以上異なるタイムゾーン間を移動した後に発生します。 新しいタイム ゾーンでの活動期間は、元の場所での通常の睡眠期間により明確に対応するため、旅行者は睡眠不足になる傾向があります。) 睡眠不足の期間中、労働者は疲労を感じ、さまざまな形でパフォーマンスに影響を与えます。 このように、さまざまな程度の睡眠不足が、不規則勤務を余儀なくされている労働者の日常生活に組み込まれており、そのような睡眠不足の悪影響に対処するための対策を講じることが重要です。 睡眠不足につながる主な不規則勤務の条件を表1に示します。
表1 さまざまな程度の睡眠不足につながる主な不規則勤務の条件
|
不規則な労働時間 |
睡眠不足につながる条件 |
|
夜勤 |
夜間の睡眠がない、または短くなる |
|
早朝または深夜勤務 |
睡眠の短縮、睡眠の乱れ |
|
長時間労働または二交代制の同時勤務 |
睡眠の相転移 |
|
夜勤や早朝勤務 |
睡眠の相転移 |
|
シフト間の短い期間 |
短く乱れた睡眠 |
|
休みの間隔が長い |
睡眠不足の蓄積 |
|
異なるタイムゾーンで働く |
発生した場所での「夜」の時間帯の睡眠不足または睡眠の短縮 (時差ぼけ) |
|
不均衡な自由時間 |
睡眠の相転移、短い睡眠 |
極端な状況では、睡眠不足が XNUMX 日以上続くこともあります。 その後、睡眠不足の期間が長くなるにつれて、眠気とパフォーマンスの変化が増加します。 しかし、労働者は通常、睡眠不足が長引く前に何らかの形で睡眠を取ります。 この睡眠が十分でないと、睡眠不足の影響が継続します。 したがって、さまざまな形での睡眠不足の影響だけでなく、労働者が睡眠不足から回復する方法を知ることが重要です。
図 1. XNUMX 晩の睡眠不足にさらされた被験者グループのパフォーマンス、睡眠評価、および生理学的変数
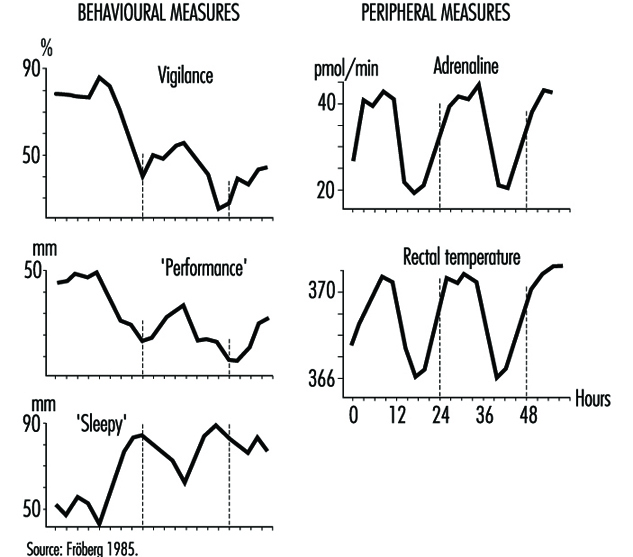
睡眠不足の複雑な性質は、図 1 に示されています。これは、1985 日間の睡眠不足の影響に関する実験室での研究のデータを示しています (Fröberg XNUMX)。 このデータは、長期にわたる睡眠不足による XNUMX つの基本的な変化を示しています。
- 客観的なパフォーマンスとパフォーマンス効率の主観的な評価の両方で、一般的に減少傾向があります。
- パフォーマンスの低下は、時間帯に影響されます。 このサイクリングの低下は、概日周期を持つ生理学的変数と相関しています。 たとえば、アドレナリンの排泄と体温が、生理学的測定値が低い通常の夜の睡眠に最初に割り当てられた期間よりも高い場合、通常の活動段階でパフォーマンスが向上します。
- 眠気の自己評価は、継続的な睡眠不足の時間とともに増加し、時刻に関連する明確な周期的要素があります。
睡眠不足の影響が生理学的な概日リズムと相関しているという事実は、その複雑な性質を理解するのに役立ちます (Folkard and Akerstedt 1992)。 これらの影響は、日常生活における睡眠-覚醒サイクルの位相シフトの結果と見なされるべきです。
したがって、継続的な作業または睡眠不足の影響には、注意力の低下だけでなく、パフォーマンス能力の低下、眠りに落ちる可能性の増加、健康と士気の低下、および安全性の低下が含まれます. 交替制労働者の場合のように、このような睡眠不足の期間が繰り返されると、彼らの健康が影響を受ける可能性があります (Rutenfranz 1982; Koller 1983; Costa et al. 1990)。 したがって、研究の重要な目的は、睡眠不足が個人の幸福をどの程度損なうか、そしてそのような影響を軽減するために睡眠の回復機能をどのように使用できるかを判断することです.
睡眠不足の影響
睡眠不足の夜中や睡眠不足の後でも、人体の生理的概日リズムは維持されているようです。 たとえば、夜勤労働者の勤務初日の体温曲線は、基本的な概日パターンを維持する傾向があります。 夜間は早朝に向かって気温が下がり、その後の日中に上昇し、午後のピーク後に再び低下します。 生理学的リズムは、夜勤労働者の逆の睡眠覚醒サイクルに「順応」することが知られている. これは、パフォーマンスと眠気への影響が、日中よりも夜間に顕著であることを意味します。 したがって、睡眠不足の影響は、生理的および心理的機能に見られる元の概日リズムとさまざまに関連しています。
睡眠不足がパフォーマンスに与える影響は、実行するタスクの種類によって異なります。 課題のさまざまな特徴が効果に影響を与えます (Fröberg 1985; Folkard and Monk 1985; Folkard and Akerstedt 1992)。 一般に、複雑なタスクは単純なタスクより脆弱です。 桁数の増加やより複雑なコーディングを伴うタスクのパフォーマンスは、1985 日間の睡眠不足の間にさらに低下します (Fröberg 1964; Wilkinson 2)。 一定の間隔内で対応する必要があるペースのとれたタスクは、セルフペースのタスクよりも劣化します。 脆弱なタスクの実際の例には、定義された刺激に対する一連の反応、単純な並べ替え操作、コード化されたメッセージの記録、コピーの入力、ディスプレイの監視、および継続的な検査が含まれます。 睡眠不足が激しい身体能力に及ぼす影響も知られています。 長時間の睡眠不足がパフォーマンス (視覚的課題) に及ぼす典型的な影響を図 1992 に示します (Dinges 40)。 影響は、56 晩の睡眠不足 (16 ~ 40 時間) よりも XNUMX 晩 (XNUMX ~ XNUMX 時間) の睡眠不足の後の方が顕著です。
図 2. 健康な若年成人を対象に、不眠なし (10 ~ 5 時間) に 16 晩の睡眠不足 (16 -40 時間) と 40 晩の睡眠不足 (56-XNUMX 時間)

タスクのパフォーマンスが影響を受ける程度は、概日リズムの「マスキング」コンポーネントによってどのように影響を受けるかに依存するようにも見えます。 たとえば、1993 ターゲット メモリ検索タスクなどの一部のパフォーマンス測定は、一連の反応時間タスクよりもはるかに迅速に夜間作業に適応することがわかっているため、急速に回転するシフト システムでも比較的損なわれない可能性があります (Folkard et al. XNUMX)。 睡眠不足の影響下でパフォーマンスの安全性と精度を考慮する際には、内因性の生理学的体内時計リズムとそれらのマスキングコンポーネントの影響のこのような違いを考慮に入れる必要があります。
睡眠不足がパフォーマンス効率に及ぼす影響の 1964 つは、頻繁な「失効」または無反応期間の出現です (Wilkinson 1993; Empson XNUMX)。 これらのパフォーマンスの低下は、注意力の低下または浅い睡眠の短い期間です。 これは、ビデオ録画されたパフォーマンス、目の動き、または脳波 (EEG) の記録で追跡できます。 長時間のタスク (XNUMX 分以上) は、特にタスクが複製される場合、そのような失効につながりやすくなります。 単純な反応の繰り返しやまれな信号の監視などの単調なタスクは、この点で非常に敏感です。 一方、新しいタスクはあまり影響を受けません。 変化する作業状況でのパフォーマンスも耐性があります。
睡眠不足の覚醒が徐々に減少するという証拠がある一方で、睡眠不足の間のパフォーマンスレベルへの影響は少ないと予想されます. これは、一部のパフォーマンス テストの結果が、テストが短時間で行われた場合に睡眠不足の影響をほとんど示さない理由を説明しています。 単純な反応時間タスクでは、経過すると応答時間が非常に長くなりますが、測定された残りの時間は変化しません。 したがって、実際の状況での睡眠不足の影響に関するテスト結果の解釈には注意が必要です。
睡眠不足中の眠気の変化は、明らかに生理的概日リズムとそのような休止期間に関連しています。 眠気は、夜勤の最初の時間とともに急激に増加しますが、その後の日中の時間帯では減少します。 睡眠不足が 1990 日目の夜まで続くと、夜間の眠気が非常に進行します (Costa et al. 1994; Matsumoto and Harada XNUMX)。 睡眠の必要性がほとんど抑えられないと感じられる瞬間があります。 これらの瞬間は、脳波記録によって証明されるように、脳機能の中断の出現と同様に、失効の出現に対応します。 しばらくすると、眠気は軽減されたように感じますが、その後、別の期間の効果が失われます。 しかし、労働者がさまざまな疲労感について質問された場合、彼らは通常、睡眠不足の期間と休止期間の間ずっと持続する疲労のレベルと一般的な疲労のレベルの増加に言及します. 夜間の睡眠不足から日中は主観的疲労度のわずかな回復が見られるが、睡眠不足が続くXNUMX泊目以降は疲労感が著しく進行する。
睡眠不足の間、以前の覚醒と概日相の相互作用による睡眠圧力が常にある程度存在する可能性がありますが、眠そうな被験者の状態の不安定性もコンテキスト効果によって変調されます (Dinges 1992)。 眠気は、刺激の量と種類、環境によってもたらされる興味、被験者にとっての刺激の意味によって影響を受けます。 単調な刺激や持続的な注意が必要な刺激は、警戒力の低下や失効につながる可能性があります。 睡眠不足による生理的眠気が強いほど、被験者は単調な環境に弱くなります。 モチベーションとインセンティブは、この環境への影響を無効にするのに役立ちますが、それは限られた期間だけです。
部分的な睡眠不足と蓄積された睡眠不足の影響
被験者が一晩中眠らずに働き続けると、多くのパフォーマンス機能が確実に低下します。 被験者が一睡もせずに 1981 番目の夜勤に入った場合、パフォーマンスの低下ははるかに進んでいます。 1981 泊目または 1990 泊目の完全な睡眠不足の後、たとえモチベーションが高くても、ほとんどの人は起きていられず、タスクを実行できません。 しかし、実際の生活では、そのような完全な睡眠不足の状態はめったに発生しません。 通常、人々はその後の夜勤中にいくらかの睡眠を取ります。 しかし、さまざまな国からの報告によると、昼間にとった睡眠は、夜勤によって生じた睡眠負債を回復するにはほとんどの場合不十分であることが示されています (Knauth and Rutenfranz 1991; Kogi XNUMX; ILO XNUMX)。 その結果、交替勤務者が夜勤を繰り返すにつれて、睡眠不足が蓄積されます。 同様の睡眠不足は、シフト スケジュールに従う必要があるために睡眠時間が短縮された場合にも発生します。 夜の睡眠がとれる場合でも、毎晩わずか XNUMX 時間の睡眠制限は、ほとんどの人にとって不十分な量の睡眠につながることが知られています。 このような睡眠の減少は、パフォーマンスと注意力の低下につながる可能性があります (Monk XNUMX)。
睡眠不足の蓄積、または部分的な睡眠剥奪の一因となる交替制の状況の例を表 1 に示します。 XNUMX 日以上の継続的な夜勤、交替間の短い時間、早起きの繰り返しに加えて、シフト、頻繁な夜勤、不適切な休日の割り当てにより、睡眠不足の蓄積が加速します。
日中の睡眠の質が悪い、または睡眠時間が短いことも重要です。 日中の睡眠には、覚醒の頻度の増加、深睡眠と徐波睡眠の減少、および通常の夜間睡眠とは異なるレム睡眠の分布が伴います (Torsvall、Akerstedt および Gillberg 1981; Folkard および Monk 1985; Empson 1993)。 したがって、昼間の睡眠は、良好な環境であっても、夜の睡眠ほど健全ではない場合があります.
交替制での睡眠のタイミングの違いによる質の高い睡眠の難しさは、日記の記録に基づくドイツと日本の労働者の睡眠開始時間の関数としての睡眠時間を示す図 3 に示されています (Knauth と Rutenfranz)。 1981; 小木 1985)。 概日リズムの影響により、日中の睡眠は短くせざるを得ません。 多くの労働者は日中に睡眠を分割し、可能な場合は夜に睡眠を追加することがよくあります。
図 3.入眠時間の関数としての平均睡眠時間。 ドイツと日本の交替制労働者のデータの比較。

実際の状況では、交替勤務者は、このような睡眠不足の蓄積に対処するためにさまざまな対策を講じています (Wedderburn 1991)。 たとえば、彼らの多くは、夜勤の前に事前に寝ようとしたり、夜勤の後に長い睡眠をとったりします. そのような努力は決して睡眠不足の影響を相殺するのに完全に効果的ではありませんが、かなり意図的に行われています. 対処措置の一環として、社会的および文化的活動が制限される場合があります。 たとえば、外出の自由時間活動は、XNUMX つの夜勤の間の頻度が低くなります。 したがって、睡眠のタイミングと持続時間、および睡眠不足の実際の蓄積は、仕事に関連した状況と社会的状況の両方に依存します。
睡眠不足からの回復と健康対策
睡眠不足から回復する唯一の有効な手段は睡眠です。 この睡眠の回復効果はよく知られています (Kogi 1982)。 睡眠による回復は、そのタイミングと期間によって異なる可能性があるため (Costa et al. 1990)、いつ、どのくらいの時間、睡眠をとるべきかを知ることが不可欠です。 通常の日常生活では、睡眠不足からの回復を早めるために、一晩中ぐっすり眠ることが常に最善ですが、通常、奪われた通常の夜の睡眠の代わりとして、さまざまな機会に睡眠をとることによって、睡眠不足を最小限に抑える努力がなされています. . このような交換睡眠の側面を表 2 に示します。
表 2. 通常の夜の睡眠の代わりにとられる、前進、固定、遅延睡眠の側面
|
側面 |
アドバンススリープ |
アンカースリープ |
睡眠を遅らせる |
|
時 |
夜勤前 |
断続的な夜 |
夜更かし後 |
|
演奏時間 |
通常短い |
定義上短い |
通常は短いですが、 |
|
品質 |
より長い待ち時間 |
短い待ち時間 |
より短いレイテンシ |
|
との相互作用 |
リズムの乱れ; |
に資します |
リズムの乱れ; |
夜の睡眠不足を相殺するために、日中の睡眠を「前」と「後」の段階 (つまり、夜勤の前後) に取るようにするのが通常の努力です。 このような睡眠は概日活動期と一致します。 したがって、睡眠は、より長い潜伏、短縮された徐波睡眠、レム睡眠の中断、および社会生活の障害によって特徴付けられます。 社会的および環境的要因は、睡眠の回復効果を決定する上で重要です。 睡眠の回復機能の有効性を考える上で、現実の状況で交替勤務者が概日リズムを完全に変換することは不可能であることを念頭に置く必要があります。
この点で、短い「アンカー睡眠」の興味深い特徴が報告されています (Minors and Waterhouse 1981; Kogi 1982; Matsumoto and Harada 1994)。 習慣的な毎日の睡眠の一部を通常の夜の睡眠時間に取り、残りを不規則な時間に取ると、直腸温度といくつかの電解質の尿分泌の概日リズムが 24 時間保持されます。 これは、夜間の睡眠期間中に短時間の夜間睡眠をとることで、その後の期間で元の概日リズムを維持するのに役立つことを意味します.
これらの睡眠のさまざまな回復機能を考慮して、1982 日のさまざまな時間帯にとられた睡眠は、特定の補完的な効果をもたらす可能性があると推測できます。 夜勤労働者にとって興味深いアプローチは、通常数時間続く夜の昼寝の使用です. 調査によると、夜勤中にとられるこの短い睡眠は、一部の労働者グループの間で一般的です。 このアンカー睡眠タイプの睡眠は、夜勤の疲労を軽減するのに効果的であり(Kogi 4)、回復睡眠の必要性を減らす可能性があります. 図 1994 は、昼寝をするグループとしないグループの 1984 つの連続した夜勤の主観的疲労感と勤務時間外の回復期間を比較したものです (Matsumoto and Harada 1988)。 疲労を軽減する上での夜の昼寝のプラスの効果は明らかでした. これらの効果は、夜勤後の回復期間の大部分で持続しました。 昼寝をしないグループと昼寝をするグループの総睡眠時間(夜の昼寝と翌日の睡眠を合わせた時間)を比較すると、これらXNUMXつのグループの間に有意差は見られませんでした。 したがって、夜の昼寝は、夜勤後の日中の睡眠の前に、必須の睡眠の一部をとることを可能にします。 したがって、夜勤中の昼寝は、夜勤による疲労とそれに伴う睡眠不足の回復にある程度役立つことが示唆されます (Sakai et al. XNUMX; Saito and Matsumoto XNUMX)。
図 4. 昼寝グループと非昼寝グループの XNUMX 回連続の夜勤と勤務時間外の回復期間中の主観的疲労感の平均スコア

ただし、睡眠不足に苦しむ各労働者が適用できる最適な戦略を立てることは不可能であることを認めなければなりません. これは、頻繁に夜勤を行う労働者のための一連の措置を推奨する夜勤に関する国際労働基準の策定に示されています (Kogi and Thurman 1993)。 これらの対策の多様な性質と、交替制の柔軟性を高める傾向は、柔軟な睡眠戦略を開発する努力を明確に反映しています (Kogi 1991)。 年齢、体力、睡眠習慣、その他の耐性の個人差が重要な役割を果たしている可能性があります (Folkard and Monk 1985; Costa et al. 1990; Härmä 1993)。 より良い仕事の設計と組み合わせて、勤務スケジュールの柔軟性を高めることは、この点で役立ちます (Kogi 1991)。
睡眠不足に対する睡眠戦略は、労働生活のタイプに依存し、個々の状況に合わせて十分に柔軟でなければなりません (Knauth、Rohmert、および Rutenfranz 1979; Rutenfranz、Knauth、および Angersbach 1981; Wedderburn 1991; Monk 1991)。 一般的な結論としては、適切な勤務スケジュールを選択することで夜間の睡眠不足を最小限に抑え、睡眠不足後の初期の代替睡眠や熟睡など、個々に適した睡眠を奨励することで回復を促進する必要があるということです。 睡眠不足の蓄積を防ぐことが重要です。 通常の夜の睡眠時間から労働者の睡眠を奪う夜勤の時間は、できるだけ短くする必要があります。 シフト間の間隔は、十分な長さの睡眠を可能にするのに十分な長さでなければなりません。 睡眠環境の改善や社会的ニーズへの対応も有効です。 したがって、社会的支援は、頻繁な睡眠不足に直面する労働者の健康を促進するために、労働時間の取り決め、仕事の設計、および個々の対処戦略を設計する上で不可欠です。
ワークステーション
ワークステーションの設計における統合アプローチ
人間工学において、ワークステーションの設計は重要なタスクです。 ブルーカラーであろうとホワイトカラーであろうと、どのような職場環境においても、適切に設計されたワークステーションは労働者の健康と福利だけでなく、生産性と製品の品質も促進するという一般的な合意があります. 逆に、ワークステーションの設計が不十分であると、健康上の不満や慢性職業病の発症、および製品の品質と生産性を所定のレベルに維持する上での問題を引き起こしたり、助長したりする可能性があります。
すべてのエルゴノミストにとって、上記のステートメントは些細なことに思えるかもしれません。 また、すべての人間工学者は、世界中の労働生活が人間工学的な欠点だけでなく、基本的な人間工学的原則のあからさまな違反に満ちていることも認識しています。 ワークステーション設計の重要性について、生産技術者、監督者、管理者などの担当者の間で広く認識されていないことは明らかです。
人間工学的要因の重要性を強調しているように見える産業作業に関する国際的な傾向があることは注目に値します。改善された製品品質、柔軟性、および製品配送精度に対する需要の増加です。 これらの要求は、仕事や職場の設計に関する保守的な見方と相容れないものです。
現在の状況では、ワークスペース設計の物理的要因が主な関心事ですが、ワークステーションの物理的設計は実際には作業の組織から切り離すことはできないことに留意する必要があります。 この原則は、次に説明する設計プロセスで明らかになります。 プロセスの最終結果の品質は、人間工学的知識、生産性と品質要求との統合、および参加という XNUMX つのサポートに依存します。 の 実装のプロセス 新しいワークステーションは、この統合に対応する必要があり、この記事の主な焦点です。
設計上の考慮事項
ワークステーションは仕事のためのものです。 ワークステーションの設計プロセスの出発点は、特定の生産目標を達成する必要があることです。 デザイナー (多くの場合、生産技術者またはその他の中間管理職レベルの人) は、社内で職場のビジョンを策定し、そのビジョンを自分の計画媒体を通じて実装し始めます。 このプロセスは反復的です。最初の試みは大雑把なものですが、解決策は徐々に洗練されていきます。 作業が進むにつれて、反復ごとに人間工学的な側面を考慮することが不可欠です。
それは、ことに留意すべきである 人間工学に基づくデザイン と密接に関連しているワークステーションの割合 人間工学的評価 ワークステーションの。 実際、ここで従うべき構造は、ワークステーションがすでに存在する場合、または計画段階にある場合にも同様に適用されます。
設計プロセスでは、関連するすべての側面が考慮されることを保証する構造が必要です。 これを処理する従来の方法は、考慮すべき一連の変数を含むチェックリストを使用することです。 ただし、特定の設計状況では、チェックリストの一部のみが関連する場合があるため、汎用チェックリストは膨大で使いにくい傾向があります。 さらに、実際の設計状況では、いくつかの変数が他の変数よりも重要であることが際立っています。 設計状況でこれらの要因を一緒に考慮する方法論が必要です。 この記事では、そのような方法論を提案します。
ワークステーションの設計に関する推奨事項は、関連する一連の要求に基づいている必要があります。 一般に、個々の変数の限界値を考慮するだけでは不十分であることに注意してください。 生産性と健康の維持という認識された複合目標は、従来の設計状況よりも野心的である必要があります。 特に、筋骨格疾患の問題は、多くの産業状況において主要な側面ですが、このカテゴリーの問題は決して産業環境に限定されるものではありません。
ワークステーションの設計プロセス
プロセスのステップ
ワークステーションの設計および実装プロセスでは、最初にユーザーに通知し、ユーザーが完全に参加できるようにプロジェクトを編成し、最終結果を全従業員が受け入れる可能性を高める必要があります。 この目標の扱いは、ワークステーションの物理的設計の最適解に到達する問題に集中する本論文の範囲内ではありませんが、それでも設計プロセスはそのような目標の統合を可能にします。 このプロセスでは、次の手順を常に考慮する必要があります。
- ユーザー指定の要求のコレクション
- 需要の優先順位付け
- (a) 技術仕様および (b) ユーザー用語の仕様への要求の転送
- ワークステーションの物理レイアウトの反復開発
- 物理的な実装
- 製作試用期間
- フル生産
- 残りの問題の評価と識別。
ここでは、ステップ XNUMX から XNUMX に焦点を当てます。 多くの場合、これらすべてのステップのサブセットのみが実際にワークステーションの設計に含まれています。 これにはさまざまな理由が考えられます。 一部の VDU 作業状況など、ワークステーションが標準設計である場合、一部の手順は除外される場合があります。 ただし、ほとんどの場合、リストされている手順の一部を除外すると、ワークステーションの品質が許容範囲を下回ります。 これは、経済的または時間的な制約が厳しすぎる場合、または経営陣レベルでの知識や洞察の欠如のために完全に無視されている場合に当てはまります。
ユーザー指定要求の収集
職場のユーザーを、その設計に関する限定的な意見を提供できる生産組織のメンバーとして識別することが不可欠です。 ユーザーには、たとえば、作業員、監督者、生産計画担当者、生産技術者、および安全担当者が含まれる場合があります。 経験上、これらのアクターはすべて、プロセスで利用すべき独自の知識を持っていることが明らかです。
ユーザー指定の要求のコレクションは、いくつかの基準を満たす必要があります。
- 開放性. プロセスの初期段階ではフィルターを適用しないでください。 批判を表明することなく、すべての観点に注意する必要があります。
- 無差別. プロセスのこの段階では、すべてのカテゴリの視点を平等に扱う必要があります。 一部の人は他の人よりも率直である可能性があり、他のアクターの一部を沈黙させるリスクがあるという事実に特別な考慮を払う必要があります。
- 対話による発展. 異なるバックグラウンドを持つ参加者間の対話を通じて、要求を調整し発展させる機会が必要です。 優先順位付けは、プロセスの一部として対処する必要があります。
- 多才. ユーザー指定の要求を収集するプロセスは、合理的に経済的である必要があり、専門のコンサルタントの関与や参加者側の長時間の要求を必要としません。
上記の一連の基準は、以下に基づく方法論を使用することによって満たすことができます。 品質機能の展開 (QFD) Sullivan (1986) による。 ここで、ユーザの要求は、アクターの混合グループ(8人から10人まで)が存在するセッションで収集されてもよい。 すべての参加者には、取り外し可能な粘着メモのパッドが与えられます。 彼らは、関係があると思うすべての職場の要求を、それぞれ別の紙片に書き留めるよう求められます。 作業環境と安全性、生産性と品質に関する側面をカバーする必要があります。 この活動は、必要に応じて、通常 XNUMX ~ XNUMX 分間継続します。 このセッションの後、参加者は次々と自分の要求を読み上げ、グループの全員が見ることができる部屋のボードにメモを貼るように求められます. 要求は、照明、持ち上げ補助、生産設備、到達要件、柔軟性要求などの自然なカテゴリにグループ化されます。 ラウンドの完了後、グループには、関連性と優先度に関して、一度に XNUMX カテゴリずつ、一連の要求について話し合い、コメントする機会が与えられます。
上記のようなプロセスで収集された一連のユーザー指定の要求は、要求仕様の開発の基礎の XNUMX つを形成します。 プロセスの追加情報は、製品デザイナー、品質エンジニア、エコノミストなど、他のカテゴリのアクターによって生成される場合があります。 ただし、ユーザーがこのコンテキストで行うことができる潜在的な貢献を実現することが重要です。
優先順位付けと要求仕様
仕様策定プロセスに関しては、さまざまな種類の要求をそれぞれの重要性に応じて考慮することが不可欠です。 そうしないと、考慮されたすべての側面を並行して考慮する必要があり、設計状況が複雑になり、扱いが難しくなる可能性があります。 これが、特定の設計状況でチェックリストを管理するのが難しい傾向にある理由です。
すべてのタイプのワークステーションに同等に役立つ優先度スキームを考案するのは難しい場合があります。 ただし、材料、ツール、または製品の手作業による取り扱いがワークステーションで実行される作業の重要な側面であると仮定すると、筋骨格負荷に関連する側面が優先リストの一番上にある可能性が高くなります。 この仮定の妥当性は、プロセスのユーザー要求収集段階で確認できます。 関連するユーザーの要求は、たとえば、筋肉の緊張と疲労、手の届くこと、見ること、または操作の容易さに関連している可能性があります。
ユーザーが指定したすべての要求を技術的な要求仕様に変換することは不可能な場合があることを認識しておくことが不可欠です。 このような要求は、快適さなどのより微妙な側面に関連する場合がありますが、それでも関連性が高く、プロセスで考慮する必要があります。
筋骨格負荷変数
上記の理由に沿って、筋骨格負荷に関連する一連の基本的な人間工学的変数があるという見解をここで適用します。 仕事関連の筋骨格障害 (WRMD)。 このタイプの障害は、筋骨格系に局在する疼痛症候群であり、特定の身体部分に繰り返しストレスがかかる結果として長期間にわたって発症します (Putz-Anderson 1988)。 重要な変数は次のとおりです (たとえば、Corlett 1988)。
- 筋力要求
- 作業姿勢の要求
- 時間の要求。
に関して 筋力、基準設定は、生体力学的、生理学的、および心理的要因の組み合わせに基づく場合があります。 これは、たとえばハンドルの操作に必要なハンドル質量または必要な力の観点から、出力要求の測定によって操作化される変数です。 また、非常に動的な作業に関連するピーク負荷を考慮する必要がある場合もあります。
作業姿勢 要求は、(a) 関節構造が自然な可動範囲を超えて伸ばされている状況、および (b) ひざまずく、ひねる、前かがみの姿勢、または肩の上に手を持って作業するなど、特定の特に厄介な状況をマッピングすることによって評価できます。レベル。
時間の要求 (a) 短いサイクルの反復作業、および (b) 静的な作業のマッピングに基づいて評価できます。 静的な作業評価は、作業姿勢を維持することや、長時間にわたって一定の出力を生み出すことのみに関係するわけではないことに注意してください。 特に肩関節の筋肉を安定させるという観点から見ると、動的に見える作業は静的な性質を持っている可能性があります。 したがって、長期間の共同動員を考慮する必要があるかもしれません。
ある状況が受け入れられるかどうかは、もちろん、実際には、最も高い負担にさらされている身体の部分への要求に基づいています。
これらの変数は一度に XNUMX つずつではなく、まとめて考慮する必要があることに注意することが重要です。 たとえば、まれにしか発生しない場合は、大きな力の要求が許容される場合があります。 たまに腕を肩より上に上げることは、通常は危険因子ではありません。 しかし、そのような基本変数間の組み合わせを考慮する必要があります。 これにより、基準の設定が難しく複雑になる傾向があります。
手動操作タスクの設計と評価のための修正された NIOSH 方程式 (Waters et al. 1993)、この問題は、水平距離、垂直持ち上げ高さ、持ち上げ非対称性、ハンドルの結合、持ち上げ頻度などの媒介要因を考慮した、推奨される重量制限の式を考案することによって対処されます。 このように、理想的な条件下での生体力学的、生理学的、および心理的基準に基づく 23 キログラムの許容負荷制限は、作業状況の詳細を考慮して大幅に変更される場合があります。 NIOSH 式は、持ち上げ作業を伴う作業と作業場の評価の基礎を提供します。 ただし、NIOSH 方程式の有用性に関しては厳しい制限があります。 片手リフトの分析に関する科学的証拠はまだ決定的ではありません。 これは、科学的証拠をもっぱら仕事と職場設計の基礎として適用することの問題を示しています。実際には、科学的証拠は、考慮されている種類の仕事の直接的または間接的な経験を持つ人々の教育を受けた見解と統合されなければなりません。
立方体モデル
考慮する必要がある変数の複雑なセットを考慮に入れて、職場の人間工学的評価は、大部分がコミュニケーションの問題です。 上記の優先順位付けの議論に基づいて、職場の人間工学的評価のためのキューブ モデルが開発されました (Kadefors 1993)。 ここでの主な目標は、大多数の状況におけるアウトプット力、姿勢、および時間測定値が相互に関連し優先順位付けされた基本変数を構成するという仮定に基づいて、コミュニケーション目的のための教訓的なツールを開発することでした。
基本的な変数のそれぞれについて、需要が重大度に関してグループ化される可能性があることが認識されています。 ここでは、そのようなグループ化を 1 つのクラスで行うことが提案されています。 (XNUMX) 低い要求(2) 中程度の要求 または(3) 高い需要. 需要レベルは、利用可能な科学的証拠を使用するか、ユーザーのパネルとのコンセンサス アプローチを採用することによって設定できます。 もちろん、これらの XNUMX つの選択肢は相互に排他的ではなく、同様の結果をもたらす可能性がありますが、おそらく一般性の程度は異なります。
上記のように、基本的な変数の組み合わせが、筋骨格系の愁訴および累積的な外傷障害の発症に関するリスクレベルを大部分決定します。 例えば、力と姿勢に関して少なくとも中レベルの要求もある場合、長時間の要求は作業状況を受け入れられないものにする可能性があります。 職場の設計と評価では、最も重要な変数を一緒に考慮することが不可欠です。 ここで 立方体モデル そのような評価目的のために提案されています。 基本的な変数 (力、姿勢、時間) は、立方体の 27 つの軸を構成します。 需要の組み合わせごとに、サブキューブを定義できます。 全体で、モデルには 1 のそのようなサブキューブが組み込まれています (図 XNUMX を参照)。
図 1. 人間工学評価のための「キューブ モデル」。 各立方体は、力、姿勢、時間に関連する要求の組み合わせを表しています。 光: 許容可能な組み合わせ。 グレー: 条件付きで受け入れ可能。 黒: 受け入れられない
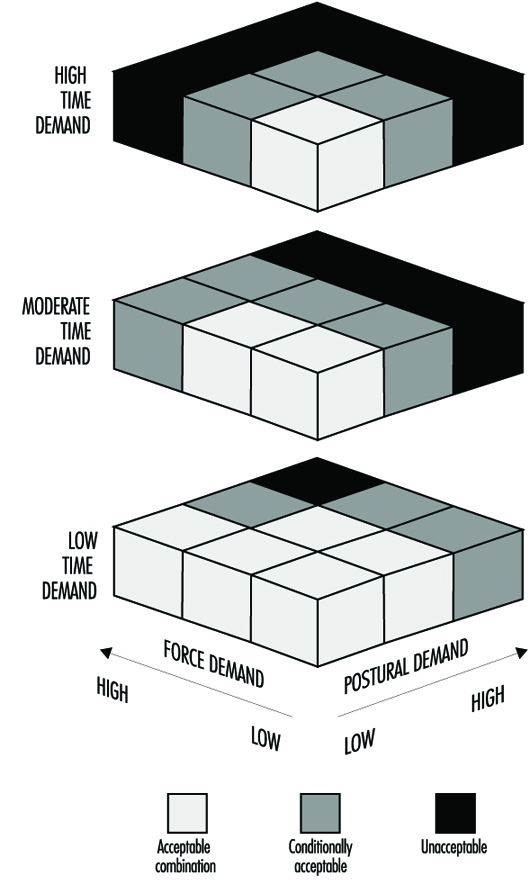
モデルの重要な側面は、需要の組み合わせの許容度です。 このモデルでは、受容性のために 1 ゾーン分類スキームが提案されています。 (XNUMX) 状況は次のとおりです。 ことができます。、(2)状況は 条件付きで受け入れられる または(3)状況は 容認できない. 教訓的な目的で、各サブキューブに特定のテクスチャまたは色 (たとえば、緑、黄、赤) を指定できます。 繰り返しますが、評価はユーザーベースまたは科学的証拠に基づく場合があります。 条件付きで許容される(黄色の)ゾーンは、「問題のオペレーター集団の全体または一部について、無視できない病気または怪我のリスクが存在する」ことを意味します(CEN 1994)。
このアプローチを開発するために、ケースを考慮することが有用です: 適度なペースの片手でのマテリアルハンドリングにおける肩への負荷の評価. これは良い例です。このような状況では、通常、肩の構造に最も大きな負担がかかるからです。
力の変数に関しては、分類はこの場合、処理された質量に基づくことができます。 ここに、 低力需要 最大自発的持ち上げ能力 (MVLC) の 10% 未満のレベルとして識別されます。これは、最適な作業ゾーンで約 1.6 kg になります。 力の要求が高い 30% 以上の MVLC、約 4.8 kg が必要です。 中程度の力の需要 これらの制限の間に収まります。 姿勢への負担が少ない 上腕が胸部に近いときです。 高い姿勢負担 上腕骨の外転または屈曲が 45°を超える場合です。 中程度の姿勢負担 外転/屈曲角度が 15° ~ 45° の場合です。 時間の需要が少ない 取り扱いがオンとオフの 10 日あたり XNUMX 時間未満、または XNUMX 日あたり連続して XNUMX 分未満の場合です。 時間の需要が高い 取り扱いが 30 営業日あたり XNUMX 時間以上、または XNUMX 分以上連続して (持続的または反復的に) 行われる場合です。 中程度の時間の需要 露出がこれらの制限の間にあるときです。
図 1 では、許容度が要求の組み合わせに割り当てられています。 例えば、時間の要求が高い場合は、力と姿勢の要求が低い場合にのみ組み合わせることができます。 許容できないものから許容できるものへの移行は、いずれかの次元の需要を削減することによって実行できますが、多くの場合、時間の需要を削減することが最も効率的な方法です。 つまり、ワークプレイスの設計を変更する必要がある場合もあれば、作業の構成を変更した方が効率的な場合もあります。
以下で考察するように、要求レベルの定義と許容度の分類のために一連のユーザーとのコンセンサス パネルを使用すると、ワークステーションの設計プロセスが大幅に向上する可能性があります。
追加の変数
上記の基本的な変数に加えて、分析する状況の特定の条件に応じて、人間工学の観点から職場を特徴付ける一連の変数と要因を考慮する必要があります。 それらには以下が含まれます:
- 事故のリスクを軽減するための予防措置
- 騒音、照明、換気などの特定の環境要因
- 気候要因への暴露
- 振動への曝露(手持ち工具または全身から)
- 生産性と品質の要求を満たす容易さ。
これらの要因の大部分は、一度に 1988 つずつ考慮することができます。 したがって、チェックリスト アプローチが役立つ場合があります。 Grandjean (1990) は、彼の教科書で、この文脈で通常考慮に入れる必要がある本質的な側面をカバーしています。 Konz (XNUMX) はそのガイドラインで、ワークステーションの編成と設計について、製造システムにおけるワーカーとマシンのインターフェースに焦点を当てた主要な質問のセットを提供しています。
ここで説明する設計プロセスでは、チェックリストをユーザー指定の要求と併せて読む必要があります。
ワークステーションの設計例: 手動溶接
実例となる (仮説的な) 例として、手動溶接用のワークステーションの実装につながる設計プロセス (Sundin et al. 1994) をここで説明します。 溶接は、高い筋肉力の要求と手作業による精度の高い要求を頻繁に組み合わせた活動です。 作品には静的な特徴があります。 多くの場合、溶接工はもっぱら溶接を行っています。 溶接作業環境は一般に、高騒音レベル、溶接煙、および光放射への暴露の組み合わせにより、敵対的です。
課題は、作業場環境で中型物体 (最大 300 kg) の手動 MIG (金属不活性ガス) 溶接用の作業場を考案することでした。 さまざまなオブジェクトを製造する必要があったため、ワークステーションは柔軟でなければなりませんでした。 生産性と品質に対する高い要求がありました。
ユーザー用語で一連のワークステーション要求を提供するために、QFD プロセスが実行されました。 溶接工、生産技術者、製品設計者が参加しました。 ここに記載されていないユーザーの要求は、人間工学、安全性、生産性、品質など、幅広い側面をカバーしていました。
立方体モデル アプローチを使用して、コンセンサスにより、高、中、低負荷の制限を特定したパネル:
- 力変数. 取り扱い質量が1kg未満を低荷重、3kg以上を高荷重と呼びます。
- 姿勢ひずみ変数. 高負担を意味する作業姿勢は、腕を上げたり、ねじったり深く前屈したり、膝をついたりする姿勢であり、手首が極端に屈曲/伸展または偏位している状況も含まれます。 姿勢が真っ直ぐ立っているか座っている場合、および手が最適な作業ゾーンにある場合は、負担が少なくなります。
- 時間変数. 溶接に費やされる作業時間の 10% 未満は低需要と見なされ、総作業時間の 40% 以上は高需要と呼ばれます。 中程度の需要は、変数が上記の範囲内にある場合、または状況が不明な場合に発生します。
立方体モデル (図 1) を使用した評価から、力と姿勢の緊張に関して高いまたは中程度の要求が同時に存在する場合、高い時間の要求を受け入れることができないことが明らかでした。 これらの要求を軽減するために、機械化された物体の取り扱いとツールの吊り下げが必要であると考えられました。 この結論については、コンセンサスが形成されました。 シンプルなコンピューター支援設計 (CAD) プログラム (ROOMER) を使用して、機器ライブラリーが作成されました。 さまざまな職場ステーションのレイアウトを非常に簡単に開発し、ユーザーとの緊密な対話で変更することができました。 この設計アプローチは、図面を見るだけに比べて大きな利点があります。 ユーザーは、意図した職場がどのように見えるかを即座に把握できます。
図 2. 設計プロセスでたどり着いた手動溶接用ワークステーションの CAD バージョン

図 2 は、CAD システムを使用して到達した溶接ワークステーションを示しています。 これは、力と姿勢の要求を軽減し、残りのユーザーの要求をほぼすべて満たす作業場です。
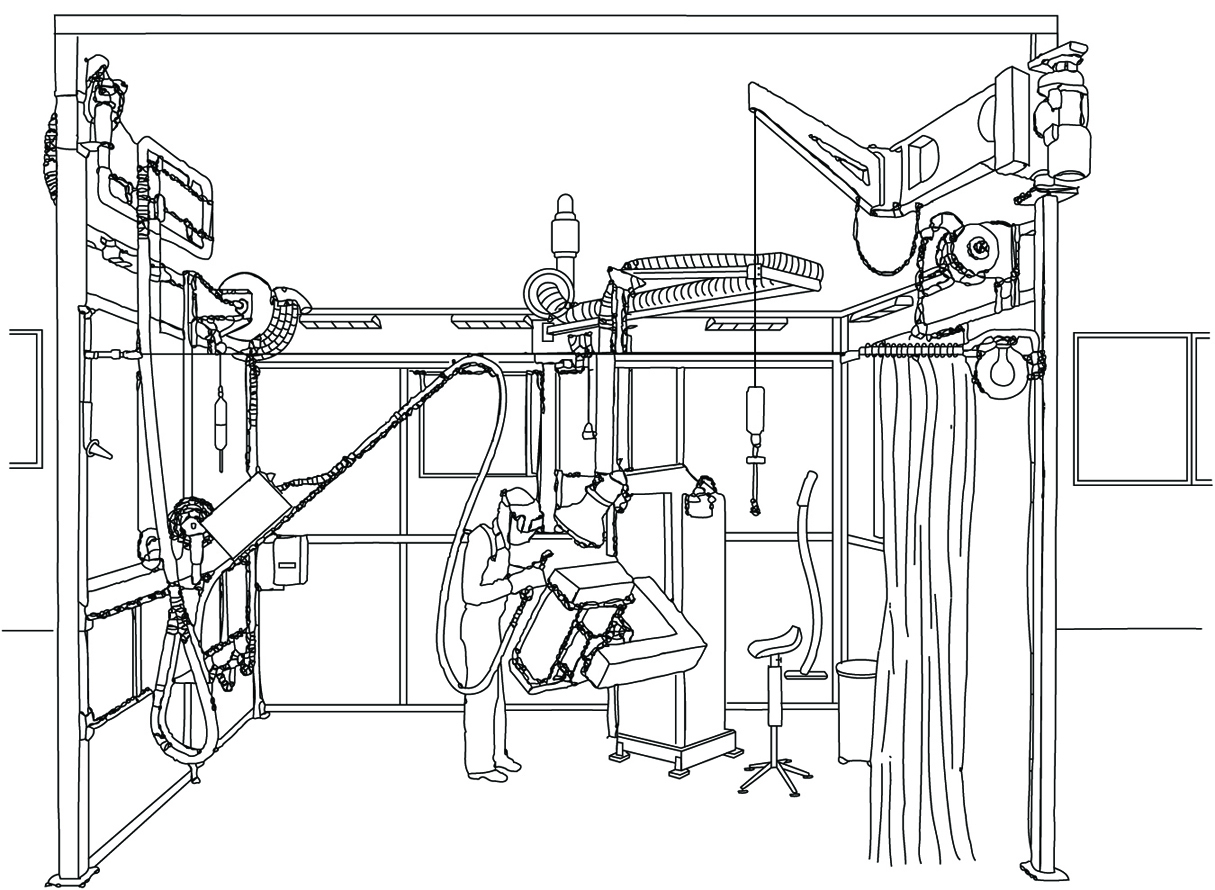
設計プロセスの最初の段階の結果に基づいて、溶接作業場 (図 3) が実装されました。 この職場の資産には次のものがあります。
- 最適化されたゾーンでの作業は、コンピュータ化された溶接対象物のハンドリング デバイスを使用して容易になります。 運搬用のオーバーヘッドホイストがあります。 代わりに、バランスのとれた持ち上げ装置が提供され、オブジェクトの取り扱いが容易になります。
- 溶接ガンと研削盤が吊り下げられているため、必要な力が軽減されます。 それらは、溶接オブジェクトの周りのどこにでも配置できます。 溶接椅子が付属しています。
- すべてのメディアは上から来るため、床にケーブルはありません。
- ワークステーションには、一般、職場、プロセスの XNUMX つのレベルの照明があります。 職場の照明は、壁要素の上の傾斜路から来ています。 プロセス照明は、溶接煙換気アームに組み込まれています。
- ワークステーションには、一般置換換気、可動アームを使用した作業場換気、MIG 溶接ガンの統合換気の XNUMX つのレベルの換気があります。 作業場の換気は溶接ガンから制御されます。
- 作業場の XNUMX 面に吸音壁要素があります。 透明な溶接カーテンが第 XNUMX の壁を覆っています。 これにより、溶接工はワークショップ環境で何が起こっているかを常に把握することができます。
実際の設計状況では、経済、スペース、およびその他の制約により、さまざまな種類の妥協が必要になる場合があります。 ただし、認可された溶接工は世界中の溶接業界で手に入れるのが難しく、かなりの投資が必要であることに注意してください。 現役の溶接工として定年退職する溶接工はほとんどいません。 熟練した溶接工を仕事に留めておくことは、関係するすべての関係者 (溶接工、会社、社会) にとって有益です。 たとえば、物体の取り扱いと位置決めのための機器が多くの溶接作業場の不可欠な構成要素であるべき非常に正当な理由があります。
ワークステーション設計のデータ
職場を適切に設計できるようにするためには、広範な基本情報セットが必要になる場合があります。 このような情報には、ユーザー カテゴリの人体測定データ、男性と女性の人口の持上げ強度およびその他の出力容量データ、最適な作業ゾーンを構成するものの仕様などが含まれます。 現在の記事では、いくつかの重要な論文への参照が示されています。
仕事とワークステーションの設計の事実上すべての側面を最も完全に扱っているのは、おそらく今でも Grandjean (1988) の教科書です。 ワークステーションの設計に関連するさまざまな人体計測の側面に関する情報は、Pheasant (1986) によって提示されています。 Chaffin と Andersson (1984) は、大量の生体力学および人体測定データを提供しています。 Konz (1990) は、多くの有用な経験則を含む、ワークステーション設計の実用的なガイドを提示しました。 特に累積的な外傷障害に関する上肢の評価基準は、Putz-Anderson (1988) によって提示されています。 ハンドツールを使用した作業の評価モデルは、Sperling et al。 (1993)。 手作業による持ち上げに関して、Waters と共同研究者は、この主題に関する既存の科学的知識を要約して、修正された NIOSH 方程式を開発しました (Waters et al. 1993)。 機能的人体測定と最適なワーキング ゾーンの仕様は、たとえば、Rebiffé、Zayana、Tarrière (1969)、および Das と Grady (1983a、1983b) によって提示されています。 Mital と Karwowski (1991) は、特に工業作業場の設計に関連するさまざまな側面をレビューする有用な本を編集しました。
関連するすべての側面を考慮してワークステーションを適切に設計するために必要な大量のデータは、生産技術者やその他の責任ある人々による最新の情報技術の使用を必要とします。 近い将来、さまざまなタイプの意思決定支援システムが利用可能になる可能性があります。たとえば、知識ベースのシステムやエキスパート システムなどです。 このような展開に関する報告は、たとえば、DeGreve と Ayoub (1987)、Laurig と Rombach (1989)、および Pham と Onder (1992) によって行われています。 しかし、特定の設計状況で必要とされるすべての関連データにエンドユーザーが簡単にアクセスできるようにするシステムを考案することは、非常に困難な作業です。
ツール
一般に、工具はヘッドとハンドルを備え、時にはシャフトを備え、電動工具の場合は本体を備えています。 ツールは複数のユーザーの要件を満たす必要があるため、基本的な競合が発生する可能性があり、妥協して満たす必要がある場合があります。 これらの競合の一部は、ユーザーの能力の制限に由来し、一部はツール自体に固有のものです。 ただし、ツールの形状と機能はある程度変更される可能性がありますが、人間の限界は本質的であり、ほとんど変更できないことを覚えておく必要があります。 したがって、望ましい変化をもたらすためには、主にツールの形状に注意を向ける必要があり、特に、ユーザーとツールの間のインターフェース、すなわちハンドルに注意を向けなければならない。
グリップの性質
広く受け入れられているグリップの特性は、 パワーグリップ 精密グリップ フォルダーとその下に フックグリップ、事実上すべての人間の手動活動を達成することができます。
釘打ちに使用されるようなパワー グリップでは、工具は部分的に曲げた指と手のひらで形成されたクランプで保持され、親指で反力が加えられます。 止めねじを調整するときに使用するような精密なグリップでは、ツールは指の屈筋面と反対側の親指の間に挟まれます。 精密グリップの変形は鉛筆グリップで、一目瞭然で複雑な作業に使用されます。 プレシジョン グリップは、パワー グリップの 20% の強さしか提供しません。
フックグリップは、保持以外の必要がない場合に使用されます。 フック グリップでは、オブジェクトは、親指のサポートの有無にかかわらず、曲げた指から吊り下げられます。 重い工具は、フック グリップで持ち運びできるように設計する必要があります。
グリップの厚さ
精密グリップの場合、推奨される太さは、ドライバーの場合は 8 ~ 16 ミリメートル (mm)、ペンの場合は 13 ~ 30 mm です。 多かれ少なかれ円筒形のオブジェクトの周りに適用されるパワー グリップの場合、指は円周の半分以上を囲む必要がありますが、指と親指が接触しないようにする必要があります。 推奨される直径は、最小 25 mm から最大 85 mm までの範囲です。 手の大きさにもよりますが、男性で55~65mm、女性で50~60mmが最適です。 手の小さい人は、直径 60 mm を超えるパワー グリップで反復動作を実行しないでください。
握力とハンドスパン
道具を使うには力が必要です。 握る以外に、ペンチや粉砕ツールなどのクロスレバー アクション ツールの使用には、手の強さに対する最大の要件が見られます。 押しつぶす際の有効な力は、握力とツールの必要なスパンの関数です。 親指の端とつかむ指の端の間の最大機能的スパンは、男性で平均約 145 mm、女性で約 125 mm であり、民族差があります。 男性と女性の両方で 45 から 55 mm の範囲の最適なスパンの場合、450 回の短時間の動作で利用できる握力は、男性で約 500 から 250 ニュートン、女性で約 300 から 90 ニュートンの範囲ですが、反復動作の場合は、推奨される要件は、おそらく男性で 100 ~ 50 ニュートン、女性で 60 ~ XNUMX ニュートンに近いでしょう。 多くの一般的に使用されるクランプやペンチは、片手で使用する能力を超えており、特に女性では.
ハンドルがねじ回しまたは同様の工具のハンドルである場合、利用可能なトルクはハンドルに力を伝達するユーザーの能力によって決定され、したがって、手とハンドルの間の摩擦係数とハンドルの直径の両方によって決定されます。 ハンドルの形状の不規則性は、トルクを加える能力にほとんど、またはまったく違いはありませんが、鋭利なエッジは不快感や最終的な組織の損傷を引き起こす可能性があります. 最大トルクがかかる円筒ハンドルの直径は50~65mmですが、球体ハンドルは65~75mmです。
ハンドル
ハンドルの形状
ハンドルの形状は、皮膚とハンドルの間の接触を最大にする必要があります。 それは一般化された基本的なものであり、一般的に平らな円筒形または楕円形の断面で、長い曲線と平らな面、または球の扇形であり、握っている手の全体的な輪郭に一致するようにまとめられている必要があります。 道具の本体に取り付けるため、ハンドルも鐙型やT型、L型などの形をとりますが、手に触れる部分が基本形となります。
指で囲まれた空間はもちろん複雑です。 単純な曲線の使用は、さまざまな手とさまざまな屈曲度によって表されるバリエーションを満たすことを意図した妥協です。 この点に関して、屈曲した指の輪郭を、尾根と谷、縦溝とくぼみの形でハンドルに導入することは望ましくありません。長期間、軟部組織に圧力損傷を引き起こします。 特に、3 mm を超えるリセスは推奨されません。
円筒形セクションの変更は六角形セクションであり、これは小口径のツールまたは器具の設計において特に価値があります。 円柱よりも小口径の六角形の方が安定したグリップを維持しやすい。 三角形および正方形のセクションもさまざまな程度で使用されてきました。 このような場合、圧力による損傷を避けるためにエッジを丸くする必要があります。
グリップ面と質感
何千年もの間、ペンチやクランプなどの工具を粉砕するためのハンドル以外に、木材が工具のハンドルの素材として選ばれてきたのは偶然ではありません。 その美的魅力に加えて、木材は容易に入手でき、熟練していない労働者でも簡単に加工でき、弾力性、熱伝導性、摩擦抵抗、バルクに比べて比較的軽いため、この用途や他の用途に非常に受け入れられています。
近年、金属製やプラスチック製のハンドルが多くのツールでより一般的になり、後者は特に軽いハンマーやドライバーで使用されています。 ただし、金属製のハンドルはより多くの力を手に伝達するため、できればゴム製またはプラスチック製のシースに収める必要があります。 グリップの表面は、可能であればわずかに圧縮可能で、非導電性で滑らかである必要があり、表面積はできるだけ広い領域に圧力が分散されるように最大化する必要があります。 フォーム ラバー グリップを使用して、手の疲れや圧痛を軽減しています。
ツール表面の摩擦特性は、手で加えられる圧力、表面の性質、および油や汗による汚れによって異なります。 少量の汗は摩擦係数を増加させます。
ハンドルの長さ
ハンドルの長さは、手の重要な寸法とツールの性質によって決まります。 例えば、パワーグリップで片手で使用されるハンマーの場合、理想的な長さは最小約 100 mm から最大約 125 mm の範囲です。 短いハンドルはパワーグリップには不向きですが、19 mm より短いハンドルは親指と人差し指の間で適切に握ることができず、どのツールにも適していません。
理想的には、コーピングまたはフレット ソー以外の電動工具またはハンド ソーの場合、ハンドルは 97.5 パーセンタイル レベルで、それに押し込まれた閉じた手の幅、つまり、長軸で 90 ~ 100 mm、および 35 mmショートで40mmまで。
重量とバランス
重さは精密工具の問題ではありません。 重いハンマーと電動工具の場合、0.9 kg から 1.5 kg までの重量が許容され、最大で約 2.3 kg です。 推奨重量を超える場合は、ツールを機械的手段で支える必要があります。
ハンマーなどの打楽器の場合、ハンドルの重量を構造強度と両立できる最小限に抑え、ヘッドの重量をできる限り多くすることが望ましい。 他のツールでは、残高は可能な限り均等に分配する必要があります。 小さなヘッドとかさばるハンドルを備えたツールでは、これは不可能かもしれませんが、ヘッドとシャフトのサイズに比べてかさばりが大きくなるにつれて、ハンドルを徐々に軽量化する必要があります。
手袋の意義
ツールの設計者は、ツールが常に素手で保持および操作されるとは限らないことを見落とすことがあります。 手袋は、安全と快適さのために一般的に着用されます。 安全手袋がかさばることはめったにありませんが、寒い気候で着用する手袋は非常に重く、感覚フィードバックだけでなく、つかんだり保持したりする能力にも干渉する可能性があります. ウールまたは革の手袋を着用すると、親指で手の厚さが 5 mm、手の幅が 8 mm 増加する可能性がありますが、重いミトンを使用すると、それぞれ 25 ~ 40 mm 増加する可能性があります。
利き手
西半球の人口の大部分は、右手の使用を好みます。 いくつかは機能的に両利きであり、すべての人がどちらの手でも多かれ少なかれ効率的に操作することを学ぶことができます.
左利きの人の数は少ないですが、可能な限りツールにハンドルを取り付けることで、左利きまたは右利きの人がツールを操作できるようにする必要があります (例には、電動工具または電動工具の補助ハンドルの配置が含まれます)。ただし、右利きの人の前腕の強力な回外筋を利用し、左利きを排除するように設計されたネジ式ファスナーの場合のように、そうすることが明らかに非効率的である場合を除きます。ハンドラーが同等の効果でそれらを使用することを防ぎます。 左ねじの提供は容認できる解決策ではないため、この種の制限は受け入れなければなりません。
性別の意義
一般に、女性は男性よりも手のサイズが小さく、握力が小さく、力が約 50 ~ 70% 弱い傾向にありますが、パーセンタイルの高い方の女性の中には、パーセンタイルの低い方の男性よりも手が大きく、力が強い人もいます。 その結果、男性の使用を念頭に置いて設計されたさまざまな手工具、特に重いハンマーや重いペンチ、金属の切断、圧着などを操作するのが困難な、大部分が女性であるが、かなりの数の人が存在します。クランプツールとワイヤーストリッパー。 女性がこれらのツールを使用するには、片手操作ではなく、望ましくない両手操作が必要になる場合があります。 したがって、男女混合の職場では、女性の要件を満たすだけでなく、手のサイズのパーセンタイルが低い男性の要件を満たすために、適切なサイズのツールを利用できるようにすることが不可欠です。
特別な考慮事項
可能であれば、ツール ハンドルの向きは、操作する手が腕と手の自然な機能位置に適合できるようにする必要があります。ほぼ完全に屈曲し、他のものはそれほど屈曲せず、親指は内転してわずかに屈曲します。この姿勢は、誤って握手位置と呼ばれることがあります。 (握手では、手首は半分以上回外しません。) 指と親指のさまざまな屈曲による手首の内転と背屈の組み合わせにより、腕の長軸と腕の間に約 15° の握り角度が生じます。親指と人差し指で作るループの中心点、つまり拳の横軸を通る線。
標準的なペンチを使用する場合に見られるように、手を尺骨偏位の位置、つまり小指に向かって曲げた状態にすることは、手首の構造内の腱、神経、および血管に圧力を発生させ、痛みを引き起こす可能性があります。腱鞘炎、手根管症候群などの障害状態。 ハンドルを曲げて手首をまっすぐに保つ (つまり、手ではなくツールを曲げる) ことにより、神経、軟部組織、および血管の圧迫を避けることができます。 この原則は長い間認識されてきましたが、工具メーカーや使用者には広く受け入れられていません。 これは、ナイフやハンマーだけでなく、ペンチなどのクロスレバー アクション ツールの設計にも特に適用されます。
ペンチとクロスレバー ツール
ペンチなどのハンドルの形状には特に注意が必要です。 伝統的にペンチは同じ長さの湾曲したハンドルを持ち、上部のカーブは手のひらのカーブに近似し、下部のカーブは曲げた指のカーブに近似します。 ツールを手に持つと、ハンドル間の軸がペンチの顎の軸と一致します。 その結果、手術では、手首を繰り返し回転させながら、手首を極端な尺骨偏位、つまり小指に向かって曲げた状態に保つ必要があります。 この位置では、体の手-手首-腕部分の使用は非常に非効率的であり、腱や関節構造に非常に負担がかかります. 動作が反復的である場合、酷使損傷のさまざまな症状を引き起こす可能性があります。
この問題に対処するために、近年、人間工学的により適切な新しいバージョンのペンチが登場しました。 これらのプライヤーでは、ハンドルの軸はジョーの軸に対して約 45° 曲げられています。 ハンドルは厚みがあり、軟部組織への局部的な圧力を抑えて握りやすくなっています。 上部のハンドルは、手のひらの尺骨側とその周りにフィットする形状で、それに比例して長くなっています。 ハンドルの前端には親指サポートが組み込まれています。 下部のハンドルは短く、前端にタングまたは丸みを帯びた突起があり、曲がった指に合わせてカーブしています。
上記はやや急進的な変更ですが、人間工学的に健全ないくつかの改善は、ペンチで比較的簡単に行うことができます。 おそらく、パワーグリップが必要な場合に最も重要なのは、ハンドルのヘッドエンドに親指サポート、もう一方の端にわずかなフレアを付けて、ハンドルを厚くし、わずかに平らにすることです. 設計に不可欠ではない場合、この変更は、基本的な金属ハンドルを、ゴムまたは適切な合成材料で作られた固定または取り外し可能な非導電性シースで包み、おそらく触覚の品質を向上させるために鈍く粗くすることによって実現できます。 指のハンドルのくぼみは望ましくありません。 繰り返し使用する場合は、ハンドルを閉じてから開くために軽いバネをハンドルに組み込むことが望ましい場合があります。
同じ原則が他のクロスレバー ツールにも適用され、特にハンドルの厚さの変化と平坦化に関して適用されます。
ナイフ
汎用ナイフ、つまりダガーの握りに使用されないナイフの場合、関節組織へのストレスを軽減するために、ハンドルとブレードの間に 15° の角度を含めることが望ましいです。 ハンドルのサイズと形状は、一般的に他のツールのサイズと形状に準拠する必要がありますが、さまざまな手のサイズに対応するために、50 つのサイズのナイフ ハンドルを提供する必要があることが提案されています。 95 ~ 5 パーセンタイルの場合。 手がブレードにできるだけ近いところに力を加えることができるように、ハンドルの上面には隆起した親指レストを組み込む必要があります。
手が刃の上に滑り落ちるのを防ぐために、ナイフガードが必要です。 ガードは、長さ約 10 ~ 15 mm のタング、または湾曲した突起など、ハンドルから下向きに突き出ている、またはハンドルに対して直角に突き出ている、または前部からハンドル後部。 サムレストは滑り止めの役割も果たします。
ハンドルは一般的な人間工学的ガイドラインに準拠し、柔軟な表面はグリースに耐性がある必要があります。
ハンマー
ハンマーの要件は、ハンドルの曲げに関するものを除いて、上記で主に考慮されています。 上記のように、手首を無理に繰り返し曲げると、組織が損傷する可能性があります。 手首の代わりにツールを曲げることで、この損傷を減らすことができます。 ハンマーに関しては、さまざまな角度が検討されていますが、実際にパフォーマンスが向上しない場合でも、ヘッドを 10° から 20° の間で下向きに曲げると快適性が向上する可能性があるようです。
スクリュードライバーとスクレイピングツール
スクレーパー、ヤスリ、手のみなど、ドライバーのハンドルや、同様の方法で保持されるその他のツールには、いくつかの特別な要件があります。 それぞれが、精密グリップまたはパワーグリップで時々使用されます。 それぞれは、安定化と力の伝達のために指と手のひらの機能に依存しています。
ハンドルの一般的な要件は既に考慮されています。 ドライバーハンドルの最も一般的な効果的な形状は、変更されたシリンダーの形状であることがわかっています。これは、手のひらを受け入れるために端がドーム型で、指の端をサポートするためにシャフトに接する部分がわずかに広がっています。 このように、腕から加えられる圧力と皮膚の摩擦抵抗によってハンドルと接触している手のひらを介してトルクが大きく加えられます。 指はある程度の力を伝達しますが、安定させる役割が多く、必要な力が少ないため疲労が少なくなります。 したがって、ヘッドのドームは、ハンドルの設計において非常に重要になります。 ドームまたはドームがハンドルと接する場所に鋭いエッジまたは隆起がある場合、手がたこができて怪我をするか、力の伝達が効率が悪く疲労しやすい指や親指に伝達されます。 シャフトは一般的に円筒形ですが、使用するとより疲れるかもしれませんが、指をよりよくサポートする三角形のシャフトが導入されました.
ドライバーやその他の留め具の使用が反復的であり、過度の使用による怪我の危険を伴う場合、手動ドライバーを、作業を妨げずに容易にアクセスできるような方法で頭上のハーネスから吊り下げられた電動ドライバーに交換する必要があります。
のこぎりと電動工具
ドライバーのようなハンドルが最も適しているフレットのこぎりと軽い弓のこを除いて、手のこぎりは、通常、のこぎりの刃に取り付けられた閉じたピストル グリップの形をとるハンドルを持っています。
ハンドルは基本的に、指を入れるループを備えています。 ループは事実上、両端が湾曲した長方形です。 手袋を装着できるように、長径で約 90 ~ 100 mm、短径で 35 ~ 40 mm の内部寸法が必要です。 手のひらと接触するハンドルは、前述の平らな円筒形で、手のひらと曲げた指に適度にフィットするように複合曲線を持っている必要があります。 外側のカーブから内側のカーブまでの幅は約 35 mm、厚さは 25 mm 以下にする必要があります。
興味深いことに、電動工具をつかんで保持する機能は、のこぎりを保持する機能と非常に似ているため、似たようなタイプのハンドルが効果的です。 電動工具で一般的なピストル グリップは、側面が平らではなく湾曲しているオープン ソー ハンドルに似ています。
ほとんどの電動工具は、ハンドル、ボディ、ヘッドで構成されています。 ハンドルの配置は重要です。 理想的には、ハンドルがボディの後部に取り付けられ、ヘッドが前に突き出るように、ハンドル、ボディ、ヘッドが一直線になるようにする必要があります。 作用線は人差し指を伸ばした線なので、頭は体の中心軸に対して偏心しています。 ただし、ツールの重心はハンドルの前にあり、トルクは手が克服しなければならない本体の回転運動を生み出すようなものです。 したがって、必要に応じて本体がハンドルの後ろと前に突き出るように、プライマリ ハンドルを重心の真下に配置する方が適切です。 あるいは、特に重いドリルでは、ドリルをどちらの手でも操作できるように、ドリルの下に補助ハンドルを配置することができます。 電動工具は通常、ハンドルの上部前端に組み込まれたトリガーによって操作され、人差し指で操作されます。 トリガーは、どちらの手でも操作できるように設計されている必要があり、必要に応じて電源をオンに保つために、簡単にリセットできるラッチ機構を組み込む必要があります。
コントロール、インジケーター、パネル
カール HE クローマー
以下では、エルゴノミクス デザインの最も重要な XNUMX つの懸念事項について説明します。 controls、オペレータから機械にエネルギーまたは信号を転送するデバイス。 XNUMX番目、 指標 または、機械の状態に関する視覚的な情報をオペレーターに提供するディスプレイ。 XNUMX つ目は、パネルまたはコンソールでのコントロールとディスプレイの組み合わせです。
座っているオペレーターのための設計
座っていると、立っているよりも安定してエネルギーを消費しない姿勢になりますが、立っているよりも作業スペース、特に足のスペースが制限されます。 ただし、立っている場合に比べて、座っている場合はフット コントロールを操作する方がはるかに簡単です。 さらに、足によって加えられる力の方向が部分的または大部分前方である場合、背もたれを備えた座席を提供することにより、かなり大きな力を加えることができる。 (この配置の典型的な例は、自動車のペダルの位置で、ドライバーの前、シートの高さよりもやや下に配置されています)。 そのスペースの特定の寸法は、実際のオペレーターの人体測定に依存することに注意してください。
図 1. フィート (センチメートル単位) の推奨される通常のワークスペース

手動コントロールを配置するためのスペースは、主に体の前にあり、肘、肩、またはこれら 2 つの体の関節の間のどこかを中心とするほぼ球形の輪郭内にあります。 図 XNUMX は、コントロールの配置スペースを模式的に示しています。 もちろん、特定の寸法はオペレーターの人体測定に依存します。
図 2. 手の推奨される通常のワークスペース (センチメートル単位)
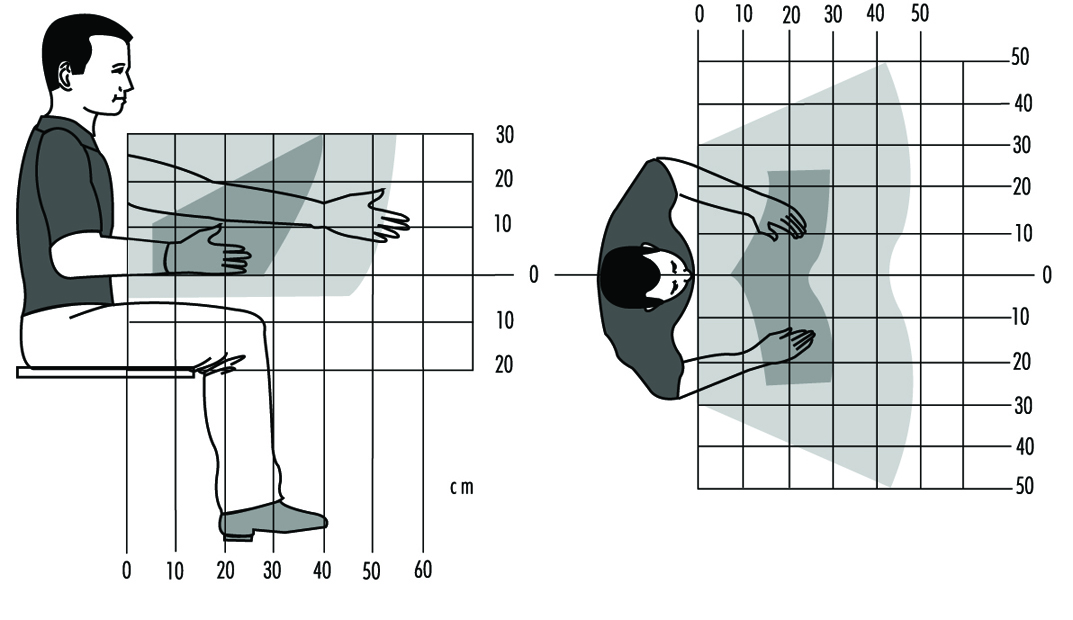
見なければならないディスプレイおよびコントロール用のスペースは、目の前にあり、目の中心にある部分的な球体の周囲によって囲まれています。 したがって、このようなディスプレイとコントロールの基準高さは、座っているオペレータの目の高さ、および胴体と首の姿勢に依存します。 約 XNUMX メートルよりも近い視覚的ターゲットの好ましい位置は、明らかに目の高さより下であり、ターゲットの近さと頭の姿勢によって異なります。 ターゲットが近ければ近いほど、位置を低くし、オペレータの内側 (正中矢状面) 内または近くに配置する必要があります。
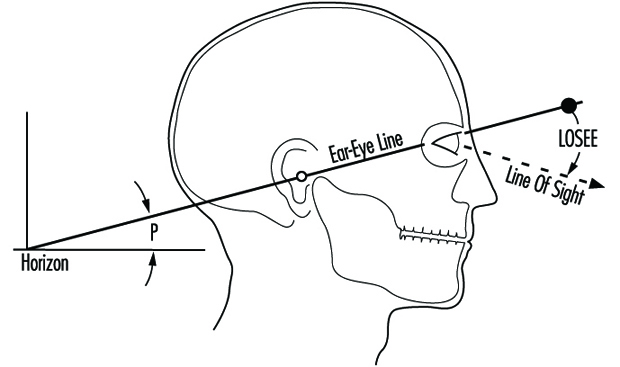
頭の姿勢は、側面図で右耳の穴と右目のまぶたの接合部を通る「耳と目のライン」(Kroemer 1994a)を使用して説明すると便利ですどちらの側にも傾いていません (瞳孔は正面図で同じ水平レベルにあります)。 通常、頭の位置を「直立」または「直立」と呼びます。 P (図 3 を参照) 耳と目の線と水平線の間の角度は約 15° で、目は耳の高さより上にあります。 視覚目標の好ましい位置は、耳と目の線より 25° ~ 65° 下です (失う 図 3) で、フォーカスを維持する必要がある近くのターゲットには、ほとんどの人が低い値を好みます。 視線の好みの角度には大きなばらつきがありますが、ほとんどの被験者は、特に年をとるにつれて、大きな距離で近くのターゲットに焦点を合わせることを好みます。 失う 角度。
常駐オペレーター向けの設計
立っているオペレーターによるペダル操作は、ほとんど必要とされないはずです。 明らかに、立っているオペレーターが XNUMX つのペダルを同時に操作することは事実上不可能です。 オペレータが静止している間、フット コントロールを配置するスペースは、トランクの下とトランクの少し前の小さな領域に限定されます。 歩き回れば、ペダルを置くスペースが増えますが、歩く距離が長くなるため、ほとんどの場合、それは非常に非現実的です。
立っているオペレータの手動制御の位置は、座っているオペレータとほぼ同じ領域を含みます。つまり、オペレータの肩の近くを中心に、体の前に約半分の球体があります。 制御操作を繰り返す場合、その半球の好ましい部分はその下部になります。 ディスプレイの位置の領域も、座っているオペレーターに適した領域と同様であり、オペレーターの目の近くを中心とするほぼ半球であり、その半球の下部に優先位置があります。 ディスプレイの正確な位置と、表示する必要があるコントロールの位置は、上記で説明したように、頭の姿勢によって異なります。
コントロールの高さは、オペレータが上腕を肩から垂らしたときの肘の高さを適切に基準としています。 見なければならないディスプレイとコントロールの高さは、オペレーターの目の高さと呼ばれます。 どちらもオペレーターの人体測定に依存しており、背の低い人や背の高い人、男性と女性、民族的出自が異なる人ではかなり異なる場合があります。
足で操作するコントロール
XNUMX 種類の制御を区別する必要があります。XNUMX つは大きなエネルギーまたは力を機械に伝達するために使用されます。 この例としては、自転車のペダルや、パワー アシスト機能を持たないより重い車両のブレーキ ペダルがあります。 制御信号が機械に伝達される、オン/オフ スイッチなどの足で操作するコントロールは、通常、少量の力またはエネルギーしか必要としません。 これら XNUMX つの極端なペダルを検討するのは便利ですが、さまざまな中間形式があり、設計者は、次の設計上の推奨事項のどれが最適かを判断する必要があります。
前述のように、繰り返しまたは継続的なペダル操作は、座ったオペレーターからのみ必要です。 大きなエネルギーと力を伝達するためのコントロールには、次のルールが適用されます。
- ペダルは、足が楽な位置で操作できるように、体の下、少し前に配置します。 往復ペダルの合計水平変位は、通常、約 0.15 m を超えてはなりません。 回転ペダルの場合、半径も約 0.15 m にする必要があります。 スイッチタイプのペダルの直線変位は最小で、約 0.15 m を超えてはなりません。
- ペダルは、進行方向と足の力が、オペレータの股関節から足関節を通るほぼ直線上にあるように設計する必要があります。
- 足首関節の足の屈曲と伸展によって操作されるペダルは、通常の位置で下肢と足の間の角度が約 90°になるように配置する必要があります。 動作中は、その角度を約 120° まで上げることができます。
- 単純に機械に信号を送る足で操作するコントロールは、通常、ON または OFF などの XNUMX つの個別の位置を持つ必要があります。 ただし、足では XNUMX つの位置を触覚で区別するのが難しい場合があることに注意してください。
コントロールの選択
次のニーズまたは条件に従って、さまざまな種類のコントロールを選択する必要があります。
- 手または足による操作
- 伝達されるエネルギーと力の量
- 自動車のハンドル操作など、「継続的な」入力の適用
- たとえば、(a) 機器のアクティブ化またはシャットダウン、(b) テレビまたはラジオのチャンネルを別のチャンネルに切り替えるなど、いくつかの個別の調整から XNUMX つを選択する、または (c) データ入力を実行するなど、「個別のアクション」を実行すること。キーボード付き。
コントロールの機能的な有用性によっても、選択手順が決まります。 主な基準は次のとおりです。
- コントロールのタイプは、ステレオタイプまたは一般的な期待に適合する必要があります (たとえば、回転ノブではなく、押しボタンまたはトグル スイッチを使用して電灯をオンにするなど)。
- コントロールのサイズと動作特性は、ステレオタイプの経験と過去の慣行に適合するものでなければなりません (たとえば、レバーではなく、自動車の両手操作用の大きなハンドルを提供するなど)。
- コントロールの操作方向は、定型的または一般的な期待に適合するものとします (たとえば、ON コントロールを左に回すのではなく、押したり引いたりします)。
- ハンド操作は小さな力と微調整を必要とするコントロールに使用され、フット操作は大まかな調整と大きな力に適しています (ただし、この原則に準拠していない自動車のペダル、特にアクセル ペダルの一般的な使用を考慮してください)。 .
|
コントロールの動きの方向 |
||||||||||||
|
演算 |
Up |
右 |
フォワード |
右回りに |
押す、 |
Down |
左 |
後方 |
戻る |
カウンター- |
プル1 |
プッシュ2 |
|
On |
+3 |
+ |
+ |
+ |
– |
+3 |
+ |
|||||
|
オフ |
+ |
– |
– |
+ |
– |
|||||||
|
右 |
+ |
– |
||||||||||
|
左 |
+ |
– |
||||||||||
|
上げる |
+ |
– |
||||||||||
|
低くなる |
– |
+ |
||||||||||
|
後退 |
– |
+ |
– |
|||||||||
|
広がります |
+ |
– |
– |
|||||||||
|
増える |
– |
– |
+ |
– |
||||||||
|
減る |
– |
– |
+ |
– |
||||||||
|
オープンバリュー |
– |
+ |
||||||||||
|
値を閉じる |
+ |
– |
||||||||||
ブランク: 該当なし。 + 最も好ましい; – あまり好まれません。 1 トリガー式コントロール付き。 2 プッシュプルスイッチ付き。 3 上はアメリカ、下はヨーロッパ。
出典: Kroemer 1995 を改変。
表 1 と表 2 は、適切なコントロールの選択に役立ちます。 ただし、コントロールの選択と設計には「自然な」ルールがほとんどないことに注意してください。 現在の推奨事項のほとんどは純粋に経験的なものであり、既存のデバイスと西洋のステレオタイプに適用されます。
|
効果 |
鍵- |
トグル |
押す- |
バー |
ラウンド |
サムホイール |
サムホイール |
クランク |
ロッカースイッチ |
レバー |
ジョイスティック |
伝説 |
スライド1 |
|
オン/オフを選択 |
+ |
+ |
+ |
= |
+ |
+ |
+ |
||||||
|
オン/スタンバイ/オフを選択 |
– |
+ |
+ |
+ |
+ |
+ |
|||||||
|
オフ/モード1/モード2を選択 |
= |
– |
+ |
+ |
+ |
+ |
|||||||
|
関連する複数の機能から XNUMX つの機能を選択 |
– |
+ |
– |
= |
|||||||||
|
XNUMX つ以上の個別の選択肢から XNUMX つを選択します |
+ |
+ |
|||||||||||
|
動作条件を選択 |
+ |
+ |
– |
+ |
+ |
– |
|||||||
|
エンゲージまたはディスエンゲージ |
+ |
||||||||||||
|
相互にいずれかを選択 |
+ |
+ |
|||||||||||
|
スケールで値を設定 |
+ |
– |
= |
= |
= |
+ |
|||||||
|
個別のステップで値を選択する |
+ |
+ |
+ |
+ |
ブランク: 該当なし。 +: 最も好ましい。 –: あまり好まれません。 = 最も好ましくない。 1 推定 (実験は知られていない)。
出典: Kroemer 1995 を改変。
図 4 は、「戻り止め」コントロールの例を示しています。これは、コントロールが静止する個別の戻り止めまたは停止を特徴としています。 また、特定の位置に設定する必要がなく、調整範囲内の任意の場所で制御操作が行われる典型的な「連続」制御も示しています。

コントロールのサイズは、主に、コントロール パネルで必要なスペースを最小限に抑えたい、隣接するコントロールの同時操作を可能にする、または不注意による同時アクティブ化を回避したいという願望によって導かれる、さまざまなコントロール タイプの過去の経験の問題です。 さらに、設計特性の選択は、コントロールが屋外または保護された環境、静止した機器または移動する車両に配置されるかどうか、または素手または手袋とミトンの使用を伴うかどうかなどの考慮事項に影響されます。 これらの条件については、章の最後にある読み物を参照してください。
いくつかの操作規則によって、コントロールの配置とグループ化が管理されます。 これらは表 3 にリストされています。詳細については、このセクションの最後にリストされている参考文献と、Kroemer、Kroemer、および Kroemer-Elbert (1994) を確認してください。
|
探します |
制御装置は、操作者に合わせて配置する必要があります。 もし |
|
一次管理 |
最も重要なコントロールは、最も有利なものでなければならない |
|
グループ関連 |
に関連する、順番に操作されるコントロール。 |
|
手配する |
コントロールの操作が所定のパターンに従う場合、コントロールは |
|
一貫性を保つ |
機能的に同一または類似のコントロールの配置 |
|
死んだオペレーター |
オペレーターが無力になり、どちらかが手放した場合 |
|
コードを選択 |
コントロールを特定するのに役立つ方法は数多くあります。 |
出典: Kroemer, Kroemer and Kroemer-Elbert 1994 を改変。
プレンティス・ホールの許可を得て転載。 全著作権所有。
誤操作防止
以下は、コントロールの不注意によるアクティブ化を防ぐための最も重要な手段であり、これらのいくつかは組み合わせることができます。
- 操作者がコントロール操作の通常のシーケンスでコントロールを誤って叩いたり動かしたりしないように、コントロールの位置と方向を決めてください。
- コントロールを物理的なバリアでくぼみ、シールド、または囲みます。
- コントロールを操作する前に、ピン、ロック、またはその他の手段を使用して、コントロールをカバーまたは保護する必要があります。
- 余分な抵抗を (粘性またはクーロン摩擦、バネ荷重、または慣性によって) 提供して、作動に通常とは異なる力が必要になるようにします。
- 「遅延」手段を提供して、コントロールが通常とは異なる動作を伴う重要な位置を通過する必要があるようにします (自動車のギア シフト メカニズムなど)。
- 重要なコントロールを起動する前に、関連するコントロールの事前操作が必要になるように、コントロール間の連動を提供します。
これらの設計では通常、コントロールの動作が遅くなり、緊急時に有害になる可能性があることに注意してください。
データ入力デバイス
ほぼすべてのコントロールを使用して、コンピューターまたはその他のデータ ストレージ デバイスにデータを入力できます。 ただし、私たちはプッシュボタン付きのキーボードを使用することに最も慣れています。 コンピューターのキーボードでも標準となっている元のタイプライター キーボードでは、キーは基本的にアルファベット順に配置されていましたが、これはさまざまな、しばしばあいまいな理由で変更されています。 場合によっては、共通のテキストで頻繁に続く文字が間隔を空けて配置されているため、元の機械式のバーがすばやく連続して打たれた場合に絡まることはありません。 キーの「行」と同様に、キーの「列」はほぼ直線で並んでいます。 しかし、指先はそのように整列しておらず、手の指を曲げたり、伸ばしたり、横に動かしたりしても、このようには動きません。
キーボード レイアウトを変更してキーイング パフォーマンスを改善するために、過去 XNUMX 年以上にわたって多くの試みが行われてきました。 これらには、標準レイアウト内のキーの再配置、またはキーボード レイアウト全体の変更が含まれます。 キーボードは別々のセクションに分割され、一連のキー (数値パッドなど) が追加されました。 隣接するキーの配置は、間隔、互いのオフセット、または基準線からのオフセットを変更することによって変更できます。 キーボードは左右のセクションに分割でき、これらのセクションは横方向に傾斜したり、傾斜したり、傾斜したりできます。
押しボタンの操作のダイナミクスはユーザーにとって重要ですが、操作中に測定することは困難です。 したがって、キーの力と変位の特性は、一般的に静的テスト用に記述されており、実際の操作を示すものではありません。 現在の慣例では、コンピューターのキーボードのキーはほとんど変位せず (約 2 mm)、「スナップバック」抵抗、つまりキーの作動が達成された時点での操作力の減少を示します。 個別の単一のキーの代わりに、一部のキーボードは膜で構成され、その下にスイッチがあり、正しい位置で押されたときに、ほとんどまたはまったく変位を感じずに目的の入力を生成します。 メンブレンの主な利点は、ほこりや液体が浸透できないことです。 ただし、多くのユーザーはそれを嫌います。
「XNUMX つのキーと XNUMX つの文字」の原則に代わるものがあります。 代わりに、さまざまな組み合わせ手段によって入力を生成できます。 XNUMXつは「コード」で、XNUMXつ以上のコントロールを同時に操作してXNUMXつのキャラクターを生成します。 これは、オペレーターの記憶能力を必要としますが、ごく少数のキーのみを使用する必要があります。 他の開発では、手の指の動きに反応するレバー、トグル、または特別なセンサー (計装された手袋など) に置き換えて、バイナリ タップ プッシュ ボタン以外のコントロールを利用しています。
伝統的に、タイピングとコンピュータへの入力は、オペレータの指と、キーボード、マウス、トラック ボール、またはライト ペンなどのデバイスとの間の機械的相互作用によって行われてきました。 しかし、入力を生成する手段は他にもたくさんあります。 音声認識は有望な技術の 1994 つに見えますが、他の方法を採用することもできます。 彼らは、情報を伝達し、コンピュータへの入力を生成するために、例えば、指さし、身振り、顔の表情、体の動き、見ること(視線を向ける)、舌の動き、呼吸または手話を利用するかもしれません. この分野の技術開発は非常に流動的であり、コンピュータ ゲームに使用される多くの非伝統的な入力デバイスが示すように、伝統的なバイナリ タップダウン キーボード以外のデバイスの受け入れは、近い将来完全に可能になります。 現在のキーボード デバイスに関する議論は、たとえば、Kroemer (1994b) と McIntosh (XNUMX) によって提供されています。
表示
ディスプレイは、機器のステータスに関する情報を提供します。 ディスプレイは、オペレータの視覚 (ライト、スケール、カウンター、ブラウン管、フラット パネル電子機器など)、聴覚 (ベル、ホーン、録音された音声メッセージ、電子的に生成された音など)、または触覚(形のコントロール、点字など)。 ラベル、説明書、警告、またはシンボル (「アイコン」) は、特別な種類の表示と見なされる場合があります。
表示に関する XNUMX つの「基本ルール」は次のとおりです。
- 適切な仕事のパフォーマンスに不可欠な情報のみを表示します。
- オペレーターの決定と行動に必要なだけ正確に情報を表示します。
- 最も直接的で、シンプルで、理解しやすく、使いやすい形式で情報を提示します。
- ディスプレイ自体の故障や誤動作がすぐにわかるように情報を提示してください。
聴覚表示または視覚表示の選択は、一般的な条件と目的によって異なります。 表示の目的は、以下を提供することです。
- 船舶の航路など、システムの過去の状態に関する履歴情報
- ワープロに入力済みのテキストや飛行機の現在位置など、システムの現在の状態に関するステータス情報
- 特定のステアリング設定が与えられた場合の、船の将来の位置などの予測情報
- オペレーターに何をすべきか、また場合によってはどのように行うかを伝える指示またはコマンド。
環境が騒がしく、オペレーターがその場にとどまり、メッセージが長く複雑で、特にオブジェクトの空間位置を扱う場合は、視覚的な表示が最も適しています。 作業場を暗くしておく必要があり、オペレーターが動き回り、メッセージが短くシンプルで、すぐに注意を払う必要があり、イベントと時間を扱う場合は、聴覚ディスプレイが適しています。
ビジュアルディスプレイ
ビジュアル表示には 1 つの基本的なタイプがあります。 チェック ディスプレイは、特定の状態が存在するかどうかを示します (たとえば、緑色のライトは正常な機能を示します)。 (2) 定性 表示は、変化する変数またはその近似値のステータス、またはその変化の傾向を示します (たとえば、ポインターが「正常な」範囲内で移動するなど)。 (3) ディスプレイには、確認する必要がある正確な情報が表示されます (たとえば、地図上の場所を見つける、テキストを読む、またはコンピューターのモニターに描画する)、またはオペレーターが読み取る必要がある正確な数値を示す場合があります (たとえば、 、時間または温度)。
ビジュアル ディスプレイのデザイン ガイドラインは次のとおりです。
- オペレータが不要な検索をしなくても簡単に見つけて識別できるように、ディスプレイを配置します。 (これは通常、ディスプレイがオペレーターの内側または内側の面に近く、目の高さより下または目の高さにあることを意味します。)
- オペレータが簡単に使用できるように、ディスプレイを機能的または順番にグループ化します。
- すべてのディスプレイが適切に照らされていること、またはその機能に応じてコード化され、ラベル付けされていることを確認してください。
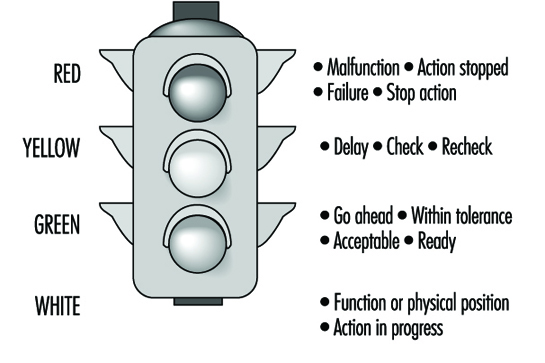
- 多くの場合色付きのライトを使用して、システムのステータス (オンまたはオフなど) を示したり、システムまたはサブシステムが動作不能であり、特別なアクションを実行する必要があることをオペレーターに警告したりします。 明るい色の一般的な意味を図 5 に示します。赤色の点滅は、すぐに対処する必要がある緊急事態を示します。 緊急信号は、音と赤いライトの点滅を組み合わせたときに最も効果的です。
より複雑で詳細な情報、特に定量的な情報については、伝統的に次の 1 種類のディスプレイのいずれかが使用されます。または (2) 「画像」表示、特にディスプレイ モニター上にコンピューターで生成されたもの。 図 3 に、これらのディスプレイ タイプの主な特徴を示します。
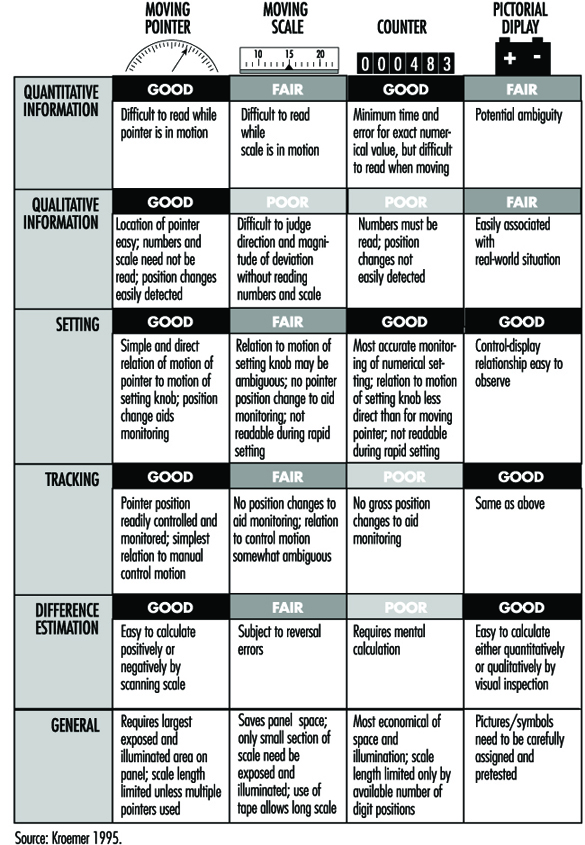
通常は、移動する目盛りよりも移動するポインターを使用することをお勧めします。目盛りは、直線 (水平または垂直に配置)、曲線、または円形のいずれかです。 目盛りはシンプルで整頓されたもので、目盛りと番号付けは正確な測定値をすばやく取得できるように設計されている必要があります。 数字は、目盛りの外側に配置して、ポインタで隠れないようにする必要があります。 ポインターは、その先端がマーキングで直接終了する必要があります。 スケールは、オペレーターが読み取らなければならないほど細かく目盛りを付ける必要があります。 すべての主要なマークに番号を付ける必要があります。 プログレッションは、メジャー マーク間に 1991、1994、または XNUMX 単位の間隔でマークするのが最適です。 数字は左から右、下から上、または時計回りに増加する必要があります。 スケールの寸法の詳細については、Cushman and Rosenberg XNUMX または Kroemer XNUMXa によってリストされたものなどの標準を参照してください。
1980 年代以降、ポインターと印刷されたスケールを備えた機械式ディスプレイは、コンピューターで生成された画像を表示する「電子」ディスプレイ、または発光ダイオードを使用したソリッドステート デバイスにますます置き換えられました (Snyder 1985a を参照)。 表示される情報は、次の方法でコード化できます。
- 直線や円形などの形状
- 英数字、つまり文字、数字、単語、略語
- 地平線に対する飛行機の輪郭など、さまざまな抽象レベルの図、写真、絵、アイコン、記号
- 黒、白、またはグレーの色合い
- 色。
残念なことに、電子的に生成されたディスプレイの多くはぼやけており、多くの場合過度に複雑でカラフルで、読みにくく、正確な焦点と細心の注意が必要で、車の運転などの主なタスクから注意をそらす可能性があります。 これらのケースでは、上記の 1991 つの「基本ルール」のうち最初の 1990 つに違反することがよくありました。 さらに、多くの電子的に生成されたポインター、マーキング、および英数字は、特に線分、走査線、またはドット マトリックスによって生成された場合、確立された人間工学的設計ガイドラインに準拠していませんでした。 これらの欠陥のあるデザインの一部はユーザーによって許容されましたが、急速な革新と表示技術の改善により、多くのより良いソリューションが可能になりました. しかし、同様の急速な発展により、印刷されたステートメント (たとえ最新で包括的なものであっても) が急速に時代遅れになっているという事実につながります。 したがって、このテキストでは何も指定されていません。 Cushman と Rosenberg (1991)、Kinney と Huey (XNUMX)、Woodson、Tillman と Tillman (XNUMX) によって編集物が出版されています。
電子ディスプレイの全体的な品質が不足していることがよくあります。 画質を評価するために使用される 1985 つの尺度は、変調伝達関数 (MTF) です (Snyder 1992b)。 これは、特別な正弦波テスト信号を使用してディスプレイの解像度を表します。 それでも、読者はディスプレイの好みに関して多くの基準を持っています (Dillon XNUMX)。
モノクロ ディスプレイには XNUMX 色しかなく、通常は緑、黄、琥珀、オレンジ、または白 (無彩色) のいずれかです。 複数の色が同じカラー ディスプレイに表示される場合、それらは簡単に識別できるはずです。 同時に表示する色は XNUMX 色または XNUMX 色以下にするのが最善です (赤、緑、黄またはオレンジ、およびシアンまたは紫が優先されます)。 すべてが背景と強く対照的であるべきです。 実際、適切なルールは、最初に対照的に、つまり白黒でデザインし、次に控えめに色を追加することです.
複雑なカラー ディスプレイの使用に影響を与える多くの変数が単独で相互に作用しているにもかかわらず、Cushman と Rosenberg (1991) はディスプレイでの色の使用に関するガイドラインを作成しました。 これらを図 7 に示します。

その他の提案は次のとおりです。
- 青 (できれば彩度が低い) は、背景や大きな形状に適した色です。 ただし、青はテキスト、細い線、または小さな図形には使用しないでください。
- 英数字の色は、背景の色と対照的である必要があります。
- 色を使用する場合は、形を冗長な合図として使用します (たとえば、すべての黄色の記号は三角形、すべての緑色の記号は円、すべての赤色の記号は正方形です)。 冗長コーディングにより、色覚障害のあるユーザーがディスプレイをより受け入れやすくなります。
- 色の数が増えると、色分けされたオブジェクトのサイズも大きくする必要があります。
- 赤と緑は、大型ディスプレイの周辺領域にある小さなシンボルや小さな形状には使用しないでください。
- 対立する色 (赤と緑、黄と青) を隣接して使用したり、オブジェクトと背景の関係で使用したりすることは、有益な場合もあれば、有害な場合もあります。 一般的なガイドラインはありません。 ケースごとに解決策を決定する必要があります。
- 彩度が高くスペクトル的に極端な色を同時に表示することは避けてください。
コントロールとディスプレイのパネル
ディスプレイとコントロールはパネルに配置して、オペレーターの前、つまり人の内側の面に近づけるようにします。 前に説明したように、コントロールは肘の高さに近く、オペレーターが座っているか立っているかに関係なく、目の高さより下または目の高さに表示する必要があります。 操作頻度の低いコントロールや重要度の低いディスプレイは、側面または上部に配置できます。
多くの場合、制御操作の結果に関する情報は計器に表示されます。 この場合、ディスプレイはコントロールの近くに配置して、コントロールの設定をエラーなく迅速かつ便利に行うことができます。 通常、割り当ては、コントロールがディスプレイのすぐ下または右にあるときに最も明確です。 コントロールを操作するときは、手がディスプレイを覆わないように注意する必要があります。
コントロールとディスプレイの関係に対する一般的な期待は存在しますが、それらはしばしば学習され、ユーザーの文化的背景と経験に依存する可能性があり、これらの関係はしばしば強力ではありません。 期待される動きの関係は、コントロールとディスプレイのタイプに影響されます。 両方が直線または回転のいずれかである場合、典型的な期待は、両方が上または両方時計回りなど、対応する方向に移動することです。 動きが一致しない場合、一般に次のルールが適用されます。
- 時計回りに増加. コントロールを時計回りに回すと、表示値が増加します。
- ウォリックのギアスライドの法則. ディスプレイ (ポインター) は、ディスプレイに近い (つまり、連動する) コントロールの側面と同じ方向に移動することが期待されます。
コントロールとディスプレイの変位の比率 (C/D 比または D/C ゲイン) は、ディスプレイを調整するためにコントロールをどれだけ動かさなければならないかを表します。 コントロールを大きく動かしてもディスプレイの動きが小さい場合は、C/D 比が高く、コントロールの感度が低いと言えます。 多くの場合、設定には XNUMX つの異なる動きが含まれます。最初に、おおよその位置への高速な一次 (「旋回」) 動作、次に正確な設定への微調整です。 場合によっては、これら XNUMX つの動きの合計を最小化する最適な C/D 比が採用されます。 ただし、最適な比率は状況によって異なります。 アプリケーションごとに決定する必要があります。
ラベルと警告
ラベル
理想的には、機器またはコントロールにその使用法を説明するラベルを要求しないでください。 しかし、多くの場合、コントロール、ディスプレイ、またはその他の機器アイテムを見つけ、識別し、読み取り、または操作できるように、ラベルを使用する必要があります。 情報が正確かつ迅速に提供されるように、ラベリングを行う必要があります。 このために、表 4 のガイドラインが適用されます。
|
利き手 |
ラベルとそこに印刷された情報は、向きを合わせてください。 |
|
会場 |
ラベルは、アイテムの上またはすぐ近くに配置するものとします。 |
|
標準化 |
すべてのラベルの配置は、 |
|
詳細 |
ラベルは、主に機能を説明するものとします (「それは何をするのか」 |
|
略語 |
一般的な略語を使用できます。 新しい略語があれば |
|
簡潔 |
ラベルの表記はできるだけ簡潔にする必要があります。 |
|
親しみ |
可能であれば、親しみのある言葉を選択する必要があります。 |
|
可視性と |
オペレーターは、簡単かつ正確に読み取ることができなければなりません。 |
|
フォントとサイズ |
タイポグラフィは、書かれた情報の読みやすさを決定します。 |
出典: Kroemer, Kroemer and Kroemer-Elbert 1994 を改変
(Prentice-Hall の許可を得て転載、無断転載を禁じます)。
フォント (書体) は、Futura、Helvetica、Namel、Tempo、Vega など、シンプルで太字の縦型でなければなりません。 ほとんどの電子的に生成されたフォント (LED、LCD、またはドット マトリックスによって形成される) は、通常、印刷されたフォントよりも劣っていることに注意してください。 したがって、これらをできるだけ読みやすくするために特別な注意を払う必要があります。
- 高さ 文字数は視聴距離によって異なります。
視聴距離 35 cm、推奨高さ 22 mm
視聴距離 70 cm、推奨高さ 50 mm
視聴距離 1 m、推奨高さ 70 mm
視聴距離 1.5 m、推奨高さ 1 cm 以上。
- ストロークの幅と文字の高さの比率 白地に黒文字の場合は 1:8 から 1:6、黒地に白文字の場合は 1:10 から 1:8 の間である必要があります。
- 文字幅と文字高さの比率 約 3:5 である必要があります。
- 文字間のスペース 少なくとも XNUMX ストローク幅である必要があります。
- 単語間のスペース 少なくとも XNUMX 文字幅にする必要があります。
- 連続テキスト、大文字と小文字を混ぜてください。 為に ラベル、大文字のみを使用してください。
警告
理想的には、すべてのデバイスが安全に使用できる必要があります。 実際には、多くの場合、これは設計では実現できません。 この場合、製品の使用に伴う危険性をユーザーに警告し、怪我や損傷を防ぐために安全に使用するための指示を提供する必要があります。
差し迫った危険を人間に警告する警告デバイスと組み合わせて、通常は不適切な使用を通知するセンサーで構成される「アクティブな」警告を用意することが望ましいです。 しかし、ほとんどの場合、「受動的な」警告が使用されており、通常は製品に貼られたラベルと、ユーザー マニュアルの安全な使用に関する指示で構成されています。 このような受動的な警告は、人間のユーザーが既存または潜在的な危険な状況を認識し、警告を記憶し、慎重に行動することに完全に依存しています。
受動的な警告のラベルと標識は、最新の政府の法律と規制、国内および国際基準、および適用可能な最適な人間工学情報に従って慎重に設計する必要があります。 警告ラベルおよびプラカードには、テキスト、グラフィック、および写真 (多くの場合、冗長なテキストを含むグラフィック) が含まれる場合があります。 グラフィックス、特に絵やピクトグラムは、慎重に選択すれば、文化や言語の背景が異なる人でも使用できます。 ただし、年齢、経験、民族的背景、教育的背景が異なるユーザーは、危険や警告に対する認識がかなり異なる場合があります。 したがって、 安全な 劣悪な製品に警告を適用するよりもはるかに望ましい製品です。
情報処理とデザイン
機器を設計する際には、人間のオペレーターが情報の処理において能力と限界の両方を持っているという事実を十分に考慮することが最も重要です。これらはさまざまな性質のものであり、さまざまなレベルで見られます。 実際の作業条件での性能は、設計がこれらの可能性とその限界にどの程度注意を払ったか、または無視したかに大きく依存します。 以下では、主な問題のいくつかを簡単に説明します。 この巻の他の寄稿を参照すると、問題がより詳細に議論されます。
人間の情報処理の分析では、XNUMX つの主なレベルを区別するのが一般的です。 知覚レベル 決定レベル と モーターレベル. 知覚レベルは、感覚処理、特徴抽出、および知覚の識別に関連する、さらに XNUMX つのレベルに細分されます。 意思決定レベルでは、オペレーターは知覚情報を受け取り、最終的にプログラムされ、運動レベルで実現される反応を選択します。 これは、選択反応の最も単純なケースでの情報の流れのみを説明しています。 しかし、行動を誘発する前に、知覚情報が蓄積され、組み合わされて診断される可能性があることは明らかです。 繰り返しますが、知覚過負荷を考慮して情報を選択する必要が生じる場合があります。 最後に、いくつかのオプションが他よりも適切である可能性がある場合、適切なアクションを選択することがより問題になります。 現在の議論では、情報処理の知覚的および決定的要因に重点が置かれます。
知覚能力と限界
感覚の限界
処理限界の最初のカテゴリーは感覚です。 情報がしきい値限界に近づくと処理の信頼性が低下するため、情報処理との関連性は明らかです。 これはかなり些細なことのように思えるかもしれませんが、それでもなお、感覚の問題は必ずしもデザインにおいて明確に認識されているわけではありません。 たとえば、標識掲示システムの英数字文字は、適切な行動の必要性と一致する距離で判読できるように十分に大きくなければなりません。 次に、読みやすさは、英数字の絶対的なサイズだけでなく、コントラスト、および横方向の抑制を考慮して、標識上の情報の総量にも依存します。 特に、視界が悪い状況 (例えば、運転中または飛行中の雨や霧) では、視認性はかなりの問題であり、追加の対策が必要です。 最近開発された交通標識や道路標示は通常、適切に設計されていますが、建物の近くや建物内の標識は判読できないことがよくあります。 視覚的表示装置は、サイズ、コントラスト、および情報量の感覚的限界が重要な役割を果たすもう XNUMX つの例です。 聴覚領域では、いくつかの主な感覚の問題は、騒がしい環境や低品質の音声伝送システムでの会話の理解に関連しています。
特徴抽出
十分な感覚情報が提供されると、次の一連の情報処理の問題は、提示された情報から特徴を抽出することに関連します。 最新の研究では、特徴の分析が意味のある全体の認識に先行するという十分な証拠が示されています。 特徴分析は、他の多くのオブジェクトの中から特別な逸脱オブジェクトを見つけるのに特に役立ちます。 たとえば、多くの値を含むディスプレイ上の重要な値が、単一の逸脱した色またはサイズで表されている場合があります。この機能は、すぐに注意を引くか、「飛び出します」。 理論的には、さまざまな色、サイズ、形状、およびその他の物理的特徴の「特徴マップ」という一般的な仮定があります。 特徴の注意値は、同じクラス (色など) に属する特徴マップの活性化の違いに依存します。 したがって、特徴マップの活性化は、逸脱した特徴の識別可能性に依存します。 これは、画面上に多くの色のいくつかのインスタンスがある場合、ほとんどの色の特徴マップがほぼ均等にアクティブになることを意味します。これにより、どの色も飛び出さないという効果があります。
同じように XNUMX つの動く広告が飛び出しますが、視野内に複数の動く刺激があると、この効果は完全になくなります。 理想的なパラメーター値を示すポインターを揃えるときにも、特徴マップの異なるアクティベーションの原則が適用されます。 ポインタのずれは、迅速に検出されるずれ勾配によって示される。 これを認識できない場合は、色の変化によって危険な逸脱が示されることがあります。 したがって、デザインの一般的なルールは、画面上でごく少数の逸脱した機能のみを使用し、それらを最も重要な情報のためにのみ予約することです。 機能の接続詞の場合、関連情報の検索が面倒になります。 たとえば、小さな赤い物体と大小の緑の物体の間にある大きな赤い物体を見つけるのは困難です。 可能であれば、効率的な検索を設計しようとするときは、接続詞を避ける必要があります。
分離可能次元と整数次元
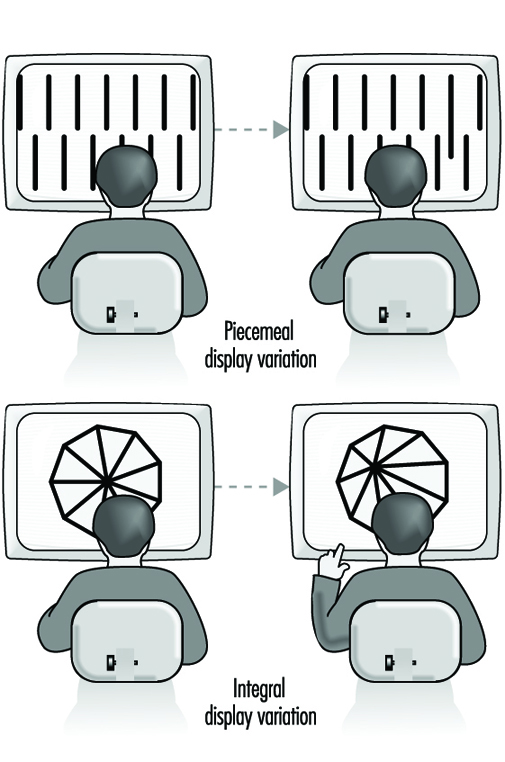
オブジェクトの他の機能の認識に影響を与えずに変更できる場合、機能は分離可能です。 ヒストグラムの線の長さはその一例です。 一方、不可欠な機能は、変更されたときにオブジェクトの全体的な外観を変更する機能を指します。 たとえば、顔の模式図の口の特徴を変更することはできず、写真の全体的な外観を変更することはできません。 繰り返しになりますが、同時に明るさの印象を変えずに色を変えることはできないという意味で、色と明るさは不可欠です。 分離可能で統合された特徴の原則、およびオブジェクトの単一の特徴の変化から発生する創発特性の原則は、いわゆる 統合された or 診断 が表示されます。 これらの表示の理論的根拠は、個々のパラメーターを表示するのではなく、さまざまなパラメーターが XNUMX つの表示に統合され、その全体的な構成がシステムの実際の問題を示すことです。
制御室でのデータ表示は、個々の測定値ごとに独自のインジケーターを使用する必要があるという哲学に依然支配されていることがよくあります。 対策の断片的な提示は、潜在的な問題を診断するために、さまざまな個々のディスプレイからの証拠を統合するタスクをオペレータが持つことを意味します。 米国のスリーマイル島原子力発電所で問題が発生した当時、約 XNUMX ~ XNUMX 台のディスプレイが何らかの障害を記録していました。 したがって、オペレーターは無数のディスプレイからの情報を統合して、実際に何が問題なのかを診断する必要がありました。 積分表示は、さまざまな測定値を XNUMX つのパターンにまとめているため、エラーの種類を診断するのに役立ちます。 したがって、統合されたディスプレイのさまざまなパターンは、特定のエラーに関して診断することができます。
原子力制御室用に提案された診断表示の古典的な例を図 1 に示します。これは、多数の測定値を等しい長さのスポークとして表示するため、正多角形は常に正常な状態を表し、さまざまな歪みが接続される可能性があります。その過程でさまざまな種類の問題が発生します。
図 1. 通常の状況では、すべてのパラメーター値が等しく、六角形が作成されます。 偏差では、一部の値が変更され、特定の歪みが生じています。
 すべての一体型ディスプレイが同じように識別できるわけではありません。 この問題を説明するために、長方形の XNUMX つの次元間に正の相関関係があると、同じ形状を維持しながら、表面に違いが生じます。 あるいは、負の相関は、等しい表面を維持しながら形状の違いを生み出します。 一体的な寸法の変化が新しい形状を作成する場合は、パターニングの創発的な特性を明らかにするものとして言及されており、パターンを識別するオペレータの能力に追加されます。 創発特性は、パーツのアイデンティティと配置に依存しますが、単一のパーツでは識別できません。
すべての一体型ディスプレイが同じように識別できるわけではありません。 この問題を説明するために、長方形の XNUMX つの次元間に正の相関関係があると、同じ形状を維持しながら、表面に違いが生じます。 あるいは、負の相関は、等しい表面を維持しながら形状の違いを生み出します。 一体的な寸法の変化が新しい形状を作成する場合は、パターニングの創発的な特性を明らかにするものとして言及されており、パターンを識別するオペレータの能力に追加されます。 創発特性は、パーツのアイデンティティと配置に依存しますが、単一のパーツでは識別できません。
オブジェクトと構成の表示が常に有益であるとは限りません。 それらが完全であるという事実は、個々の変数の特性が認識されにくいことを意味します。 ポイントは、定義上、整数次元は相互に依存しているため、個々の構成要素が曇っているということです。 これが受け入れられない状況があるかもしれませんが、オブジェクト表示に典型的な診断パターンのようなプロパティから利益を得たいと思うかもしれません。 妥協点の XNUMX つは、従来の棒グラフ表示である可能性があります。 一方では、棒グラフは非常に分離可能です。 しかし、十分に近接して配置された場合、棒の長さの差は一緒になって、診断の目的に役立つ物体のようなパターンを構成する可能性がある。
一部の診断表示は、他の表示より優れています。 それらの品質は、ディスプレイが対応する範囲に依存します。 メンタルモデル タスクの。 たとえば、図 1 のような正多角形の歪みに基づく故障診断は、ドメインのセマンティクスや発電所のプロセスのオペレーターの概念とはほとんど関係がない場合があります。 したがって、多角形のさまざまなタイプの偏差は、明らかにプラント内の特定の問題を示しているわけではありません。 したがって、最も適切な構成表示の設計は、タスクの特定のメンタル モデルに対応するものです。 したがって、長さと幅の積が対象の変数である場合、長方形の表面は有用なオブジェクト表示に過ぎないことを強調しておく必要があります。
興味深いオブジェクト ディスプレイは、XNUMX 次元表現に由来します。 たとえば、従来の XNUMX 次元レーダー表現ではなく、航空交通の XNUMX 次元表現は、パイロットに他の交通の「状況認識」を提供する可能性があります。 XNUMX 次元表示は XNUMX 次元表示よりもはるかに優れていることが示されています。これは、そのシンボルが別の航空機が自機の上にあるか下にあるかを示すためです。
劣化した状態
劣化した表示は、さまざまな条件下で発生します。 カモフラージュのように、目的によっては、識別を防ぐためにオブジェクトを意図的に劣化させます。 他の場合、たとえば輝度増幅では、特徴がぼやけすぎてオブジェクトを識別できない場合があります。 XNUMX つの研究課題は、画面に必要な「線」の最小数、または劣化を避けるために必要な「細部の量」に関するものです。 残念ながら、画質に対するこのアプローチは、明確な結果にはつながりませんでした。 問題は、劣化した刺激 (カモフラージュされた装甲車両など) の識別が、オブジェクト固有のマイナーな詳細の有無に大きく依存することです。 その結果、密度が増加すると劣化が減少するという些細な記述を除いて、線密度に関する一般的な処方箋を定式化することはできません。
英数字記号の特徴
特徴抽出のプロセスにおける主要な問題は、一緒に刺激を定義する特徴の実際の数に関するものです。 このように、ゴシック文字のような華やかな文字は、冗長な曲線が多いため、読みやすさが低下します。 混乱を避けるために、非常によく似た機能を持つ文字の違いは次のとおりです。 i と l、 そしてその c と e—強調する必要があります。 同じ理由で、アッセンダーとディセンダーのストロークとテールの長さを、文字の高さ全体の少なくとも 40% にすることをお勧めします。
文字間の識別は、主にそれらが共有しない機能の数によって決定されることは明らかです。 これらは主に、水平、垂直、斜めの方向を持ち、大文字と小文字のようにサイズが異なる直線と円形のセグメントで構成されます。
英数字が十分に識別可能であっても、他の項目との組み合わせでその特性を簡単に失う可能性があることは明らかです。 したがって、数字 4 & 7 いくつかの機能のみを共有しますが、他の点では同一のより大きなグループのコンテキストではうまく機能しません (例: 384 対 387) 小文字でテキストを読む方が大文字で読むよりも速いという全会一致の証拠があります。 これは通常、小文字の方がより明確な特徴を持っているという事実によるものです (例: 犬, cat 対 DOG, CAT)。 小文字の優位性は、テキストを読むためだけでなく、高速道路の出口で町を示すために使用される道路標識などでも確立されています。
識別
最終的な知覚プロセスは、知覚の識別と解釈に関係しています。 このレベルで生じる人間の限界は、通常、差別と知覚の適切な解釈の発見に関連しています。 視覚弁別に関する研究の応用は、英数字のパターンやより一般的な刺激の識別に関連して多様です。 自動車のブレーキ ライトの設計は、最後のカテゴリの例として役立ちます。 追突事故は、交通事故のかなりの割合を占めています。これは、ブレーキ ライトが従来、リア ライトの隣に配置されていたため、識別が難しく、ドライバーの反応時間が長くなったことが原因の XNUMX つです。 代替案として、事故率を減らすように見える単一のライトが開発されました。 ほぼ目の高さでリアウィンドウの中央に取り付けられています。 路上での実験的研究では、被験者が研究の目的を認識している場合、中央のブレーキ ライトの効果が小さくなるように見えます。これは、被験者がタスクに集中すると、従来の構成での刺激の識別が改善されることを示唆しています。 孤立したブレーキ ライトのプラスの効果にもかかわらず、ブレーキ ライトをより意味のあるものにし、感嘆符、「!」、さらにはアイコンの形にすることで、その識別がさらに改善される可能性があります。
絶対的な判断
物理的な寸法を絶対的に判断する場合、非常に厳密でしばしば直観に反するパフォーマンス制限が発生します。 例は、オブジェクトの色分けと音声呼び出しシステムでのトーンの使用に関連して発生します。 ポイントは、相対的な判断が絶対的な判断よりもはるかに優れているということです。 絶対的な判断の問題は、コードを別のカテゴリに変換する必要があることです。 したがって、特定の色が電気抵抗値と関連付けられている場合や、特定のトーンが、その後のメッセージを意味する人物に向けられている場合があります。 したがって、実際、問題は知覚的同一化の問題ではなく、この記事の後半で説明する応答の選択の問題です。 この時点で、エラーを避けるために、XNUMX つまたは XNUMX つを超える色またはピッチを使用してはならないことに注意するだけで十分です。 より多くの選択肢が必要な場合は、ラウドネス、持続時間、トーンのコンポーネントなど、追加の次元を追加できます。
単語の読み方
伝統的な印刷物で単語単位を別々に読むことの関連性は、さまざまな広く経験された証拠によって実証されています。たとえば、スペースが省略されていると読み取りが非常に妨げられたり、印刷エラーが検出されないことが多く、交互の場合に単語を読むことは非常に困難であるという事実などです。 (例えば、 交代)。 一部の研究者は、単語単位の読み取りにおける単語の形状の役割を強調し、空間周波数アナライザーが単語の形状の識別に関連している可能性があることを示唆しています。 この見方では、意味は文字ごとの分析ではなく、全体の単語の形から導き出されます。 しかし、単語の形状分析の寄与は、おそらく小さな一般的な単語 (冠詞と語尾) に限定されています。これは、小さな単語と語尾の印刷エラーが検出される可能性が比較的低いという発見と一致しています。
小文字のテキストには、大文字の機能が失われるため、大文字よりも利点があります。 それでも、小文字の単語の利点は存在しないか、単一の単語を検索するときに逆になることさえあります. 文字サイズと大文字/小文字の要因が検索で混同されている可能性があります。大きなサイズの文字はより迅速に検出され、あまり目立たない特徴の欠点を相殺する可能性があります。 したがって、単一の単語は大文字でも小文字でもほぼ同じように読みやすく、連続したテキストは小文字の方が速く読めます。 多くの小文字の単語の中で単一の大文字の単語を検出すると、ポップアウトが発生するため、非常に効率的です。 単一の小文字の単語を印刷することにより、さらに効率的な高速検出を実現できます 大胆なこの場合、ポップアウトの利点とより特徴的な機能の利点が組み合わされます。
読み取りにおける符号化機能の役割は、かなり粗いドット マトリックスで構成され、英数字を直線としてしか表現できなかった古い低解像度の視覚的表示ユニット画面の読みやすさからも明らかです。 一般的な発見は、低解像度のモニターからのテキストの読み取りまたは検索は、紙に印刷されたコピーよりもかなり遅いということでした. 現在の高解像度スクリーンでは、この問題はほとんどなくなりました。 紙からの読み取りと画面からの読み取りには、文字の形式以外にもいくつかの違いがあります。 行間、文字の大きさ、書体、文字と背景のコントラスト比、見る距離、ちらつきの量、画面上のページの切り替えがスクロールによって行われることなどがその例です。 理解力はほぼ同じように見えますが、コンピューター画面からの読み取りが遅くなるという一般的な発見は、これらの要因の組み合わせによる可能性があります. 現在のテキスト プロセッサは、通常、フォント、サイズ、色、形式、およびスタイルでさまざまなオプションを提供しています。 そのような選択は、個人的な好みが主な理由であるという誤った印象を与える可能性があります。
アイコンと言葉
いくつかの研究では、被験者が印刷された単語に名前を付けるのにかかる時間は、対応するアイコンの名前を付けるのにかかる時間よりも速いことがわかりましたが、他の研究では両方の時間はほぼ同じ速さでした. あいまいさが少ないため、単語はアイコンよりも速く読まれることが示唆されています。 家のようなかなり単純なアイコンでさえ、被験者間で異なる反応を引き出す可能性があり、その結果、反応の衝突が生じ、反応速度が低下します. 非常に明確なアイコンを使用して応答の競合を回避すると、応答速度の違いがなくなる可能性があります。 交通標識として、言葉を理解するという問題が問題と見なされていない場合でも、通常、アイコンは言葉よりもはるかに優れていることに注意するのは興味深いことです。 このパラドックスは、交通標識の読みやすさは主に、 距離 標識が確認できる場所。 適切に設計されていれば、この距離は単語よりもシンボルの方が大きくなります。これは、写真の方が形の違いがかなり大きく、単語よりも詳細が少ないためです。 画像の利点は、文字の識別には 1 ~ 2 分程度の角度が必要であり、特徴の検出が識別の最初の前提条件であるという事実から生じます。 同時に、シンボルの優位性が保証されるのは、(3) 実際にはほとんど詳細が含まれていない、(XNUMX) 形状が十分に明確である、(XNUMX) 明確である場合のみであることは明らかです。
意思決定の能力と限界
教訓が特定され、解釈されると、行動が必要になる場合があります。 このコンテキストでは、議論は決定論的な刺激-反応関係、つまり、各刺激が独自の固定反応を持つ条件に限定されます。 その場合、機器設計の主な問題は、互換性の問題、つまり、特定された刺激とそれに関連する反応が「自然な」または十分に実践された関係をどの程度持っているかという問題から生じます。 省略形の場合のように、最適な関係が意図的に破棄される条件があります。 通常、次のような収縮 略語 のような切り捨てよりもはるかに悪いです 略語. 理論的には、これは、単語内の連続する文字の冗長性が高まるためです。これにより、以前の文字に基づいて最後の文字を「埋める」ことができます。 切り捨てられた単語はこの原則から利益を得ることができますが、短縮された単語は利益を得ることができません。
メンタルモデルと互換性
ほとんどの互換性の問題には、一般化されたメンタル モデルに由来するステレオタイプの応答があります。 円形ディスプレイでヌル位置を選択するのはその好例です。 12 時と 9 時の位置は、6 時と 3 時の位置よりも速く修正されているように見えます。 その理由としては、時計回りのずれとディスプレイ上部の動きが「増加」として認識され、値を減少させる応答が必要になる可能性があります。 3 時と 6 時の位置では、両方の原則が競合するため、効率が低下する可能性があります。 同様のステレオタイプは、車の後部ドアをロックしたり開いたりする場合にも見られます。 ほとんどの人は、ロックするには時計回りの動きが必要だというステレオタイプに基づいて行動します。 ロックが反対の方法で設計されている場合、ドアをロックしようとする際の継続的なエラーとフラストレーションが発生する可能性が最も高くなります.
コントロールの動きに関しては、互換性に関するよく知られたウォリックの原理が、コントロール ノブの位置とディスプレイ上の動きの方向との関係を説明しています。 コントロール ノブがディスプレイの右側にある場合、時計回りに動かすとスケール マーカーが上に移動します。 または、ウィンドウ ディスプレイの移動を検討してください。 ほとんどの人のメンタル モデルによると、ディスプレイが上方向に移動すると、温度計の温度上昇がより高い水銀柱によって示されるのと同じように値が上昇することが示唆されます。 この原則を「固定ポインター移動スケール」インジケーターで実装するには問題があります。 このようなインジケーターの目盛りが下に移動すると、その値は増加するように意図されています。 したがって、一般的なステレオタイプとの対立が発生します。 値が反転している場合、低い値がスケールの一番上にあり、これもほとんどの固定観念に反しています。
用語 近接互換性 システム内の機能的または空間的関係の人間のメンタルモデルへの象徴的表現の対応を指します。 状況のメンタルモデルがより原始的、グローバル、または歪んでいるため、近接互換性の問題はより差し迫っています。 したがって、複雑な自動化された産業プロセスのフロー図は、プロセスのメンタル モデルとはまったく対応しない可能性のある技術モデルに基づいて表示されることがよくあります。 特に、プロセスのメンタル モデルが不完全または歪んでいる場合、進行状況を技術的に表現しても、それを開発または修正するのにほとんど役に立ちません。 近接互換性が低い日常生活の例としては、視聴者のオリエンテーションや避難経路の表示を目的とした建物の建築地図があります。 これらのマップは通常、特に建物の全体的なメンタル モデルしか持っていない人にとっては、まったく不適切であり、無関係な詳細でいっぱいです。 このような地図の読み取りと方向の収束は、「状況認識」と呼ばれるものに近づきます。これは、飛行中の XNUMX 次元空間で特に重要です。 XNUMX 次元オブジェクト ディスプレイの最近の興味深い開発は、このドメインで最適な近接互換性を実現する試みを表しています。
刺激応答の互換性
刺激応答 (SR) 互換性の例は通常、コマンドが特定のキーの組み合わせにどのように対応するかをオペレーターが知っていると仮定するほとんどのテキスト処理プログラムの場合に見られます。 問題は、コマンドとそれに対応するキーの組み合わせが通常、既存の関係を持たないことです。つまり、SR 関係は、ペアと連想の学習という骨の折れるプロセスによって学習する必要があります。 その結果、スキルを習得した後でも、タスクはエラーを起こしやすいままです。 プログラムの内部モデルは不完全なままであり、あまり慣れていない操作は忘れられがちであり、オペレーターは適切な応答を思いつくことができません。 また、通常、画面上に生成されるテキストは、印刷されたページに最終的に表示されるものとすべての点で対応しているわけではありません。これは、近接互換性が劣る別の例です。 コマンドを制御するための刺激応答関係に関連して、ステレオタイプの空間内部モデルを利用するプログラムはごくわずかです。
指差し反応と空間的位置の関係、または言語刺激と音声反応の関係のように、空間刺激と手動反応の間にははるかに優れた既存の関係があると正しく主張されてきました。 空間表現と言語表現は、相互干渉がほとんどなく、相互対応もほとんどない比較的別個の認知カテゴリであるという十分な証拠があります。 したがって、テキストの書式設定などの空間的なタスクは、空間的なマウス タイプの動きによって最も簡単に実行できるため、口頭でのコマンドはキーボードから離れることができます。
これは、キーボードが口頭でのコマンドの実行に最適であることを意味するものではありません。 タイピングは、基本的に文字の処理と互換性のない任意の空間位置を手動で操作する問題のままです。 これは実際には、広範な練習によってのみ習得される非常に相容れないタスクの別の例であり、スキルは継続的な練習なしでは簡単に失われます。 同様の議論は、任意の書かれた記号を言語刺激に接続することからなる速記についても行うことができます。 キーボード操作の代替方法の興味深い例は、コード キーボードです。
オペレーターは、XNUMX つのキーで構成される XNUMX つのキーボード (左手用と右手用) を操作します。 アルファベットの各文字は、コード応答、つまりキーの組み合わせに対応しています。 このようなキーボードに関する研究結果は、タイピング スキルの習得に必要な時間を大幅に節約できることを示しています。 モーターの制限により、コード技術の最大速度が制限されましたが、それでも、一度習得すると、オペレーターのパフォーマンスは従来の技術の速度に非常に近くなりました.
空間的互換性効果の古典的な例は、ストーブ バーナー コントロールの従来の配置に関係しています。2 × 2 マトリックスの XNUMX つのバーナーと、コントロールが水平に並んでいます。 この構成では、バーナーと制御の間の関係は明らかではなく、十分に学習されていません。 ただし、多くのエラーにもかかわらず、ストーブの点火の問題は、時間があれば通常は解決できます。 未定義の表示制御関係に直面すると、状況はさらに悪化します。 SR 互換性が低い他の例は、ビデオ カメラ、ビデオ レコーダー、およびテレビ セットの表示制御関係に見られます。 その結果、多くのオプションが使用されないか、新しい試行ごとに新たに検討する必要があります。 「マニュアルですべて説明されている」という主張は真実ではありますが、実際には、ほとんどのマニュアルは平均的なユーザーには理解できないため、特に互換性のない言葉を使用してアクションを説明しようとすると、役に立ちません。
刺激 - 刺激 (SS) と応答 - 応答 (RR) の互換性
もともとSSとRRの互換性はSRの互換性と区別されていました。 SS 互換性の古典的な例は、XNUMX 代後半に、信号検出を強化するために視覚的表示によって聴覚ソナーをサポートする試みに関するものです。 XNUMXつの解決策は、左から右に移動し、聴覚の背景ノイズと潜在的な信号の視覚的な変換を反映する垂直摂動を伴う水平光ビームで求められました。 信号は、わずかに大きな垂直摂動で構成されていました。 実験では、聴覚ディスプレイと視覚ディスプレイの組み合わせは、単一の聴覚ディスプレイよりも優れていないことが示されました。 その理由は、SS との互換性が低い場合に求められました。聴覚信号はラウドネスの変化として知覚されます。 したがって、明るさの変化の形で提供される場合、視覚的なサポートが最も対応するはずです。これは、ラウドネスの変化と互換性のある視覚的な類似物であるためです。
SS 適合性の程度が、クロスモダリティ マッチングにおける被験者の熟練度に直接対応することは興味深いことです。 クロスモダリティの一致では、被験者は、どの聴覚ラウドネスが特定の明るさまたは特定の重量に対応するかを示すように求められる場合があります。 このアプローチは、感覚刺激を数字にマッピングすることを避けることができるため、感覚次元のスケーリングに関する研究で人気があります。 RR 互換性とは、同時動作と連続動作の対応を指します。 一部の動きは他の動きよりも容易に調整できます。これにより、一連のアクション (たとえば、コントロールの連続操作) を最も効率的に実行する方法に明確な制約が与えられます。
上記の例は、互換性の問題がすべてのユーザーとマシンのインターフェイスにどのように浸透しているかを明確に示しています。 問題は、互換性の低さの影響が長時間の練習によって緩和されることが多いため、気付かれないか過小評価されたままになる可能性があることです. しかし、互換性のない表示制御関係が十分に実践されており、パフォーマンスに影響を与えていないように見える場合でも、エラーの可能性が大きくなる点が残っています。 互換性のない誤った応答は、互換性のない正しい応答に対する競合のままであり、偶発的に発生する可能性が高く、明らかな事故のリスクがあります。 さらに、互換性のない SR 関係をマスターするために必要な練習量は膨大であり、時間の無駄です。
モーターのプログラミングと実行の限界
モータ プログラミングの XNUMX つの制限については、RR の互換性に関する説明で既に簡単に触れました。 人間のオペレータは、不適合な動作シーケンスを実行する際に明らかな問題を抱えており、特に、ある不適合なシーケンスから別の不適合なシーケンスに変更することは困難です。 運動協調に関する研究の結果は、両手がアクティブなコントロールの設計に関連しています。 しかし、アクロバティックな技術の驚くべきレベルから明らかなように、練習はこの点で多くを克服することができます.
コントロールの設計における多くの一般的な原則は、モーターのプログラミングから派生しています。 それらには、コントロールへの抵抗の組み込みと、それが適切に操作されたことを示すフィードバックの提供が含まれます。 準備運動状態は、反応時間の非常に関連性の高い決定要因です。 予期せぬ突然の刺激への反応には、さらに XNUMX 秒ほどかかる場合があります。これは、先行車のブレーキ ライトに反応する場合など、素早い反応が必要な場合にはかなりの時間を要します。 準備ができていない反応は、おそらく連鎖衝突の主な原因です。 早期警告信号は、このような衝突を防ぐのに役立ちます。 動きの実行に関する研究の主な用途は、動き、距離、および狙うターゲットのサイズに関連するフィットの法則に関するものです。 この法則は非常に一般的なようで、操作レバー、ジョイスティック、マウス、またはライト ペンにも同様に適用されます。 とりわけ、コンピューター画面で修正を行うのに必要な時間を見積もるために適用されています。
上記の大ざっぱな発言以外にも、言うべきことが明らかにたくさんあります。 たとえば、議論は単純な選択反応のレベルでの情報の流れの問題にほぼ完全に限定されています。 情報と運動活動の継続的な監視におけるフィードバックとフィードフォワードの問題も、選択反応を超えた問題には触れられていません。 言及された問題の多くは、記憶の問題や行動計画の問題と強く関連していますが、これらの問題も解決されていません。 たとえば、Wickens (1992) では、より広範な議論が見られます。
特定のグループ向けの設計
製品や産業プロセスを設計する際、人は「平均的」で「健康な」労働者に焦点を当てます。 筋力、身体の柔軟性、リーチの長さ、および他の多くの特性に関する人間の能力に関する情報は、大部分が軍の採用機関によって実施された実証研究から得られたものであり、XNUMX 代の典型的な若い男性に有効な測定値を反映しています。 . しかし、確かに労働人口は、さまざまな身体的タイプと能力、フィットネスと健康のレベル、および機能的能力は言うまでもなく、男女と幅広い年齢層の人々で構成されています. 世界保健機関によって概説されている人々のさまざまな機能制限の分類は、添付の資料に記載されています。 記事「ケース スタディ: 人の機能制限の国際分類」。 現在、工業デザインの大部分は、一般的な労働者の一般的な能力(またはその点については無能)を十分に考慮しておらず、出発点としてより広い人間の平均をデザインの基礎として採用する必要があります. 明らかに、20 歳の適切な身体的負荷は、15 歳または 60 歳の管理能力を超える可能性があります。 効率の観点だけでなく、業務上のけがや病気の予防という観点からも、こうした違いを考慮するのは設計者の仕事です。
テクノロジーの進歩により、欧米では全職場の60%が着席するという状況になっています。 作業状況における身体的負荷は、現在、平均して以前よりはるかに少なくなっていますが、多くの職場では、人間の身体能力に合わせて十分に減らすことができない身体的負荷が求められています。 一部の開発途上国では、現在のテクノロジーのリソースを利用して、人間の身体的負担をかなり軽減することはできません. また、技術先進国では、設計者が製品仕様や生産プロセスによって課される制約に自分のアプローチを適応させ、障害や作業負荷による害の防止に関連する人的要因を軽視したり除外したりすることは、依然として一般的な問題です。 . これらの目的に関して、設計者は、そのようなすべての人的要因に注意を払い、研究の結果を形で表現するように教育されなければなりません。 製品要件ドキュメント (PRD)。 PRD には、期待される製品品質レベルと生産プロセスにおける人間の能力ニーズの満足の両方を達成するために設計者が満たさなければならない要求のシステムが含まれています。 あらゆる点でPRDと一致する製品を求めることは現実的ではありませんが、妥協は避けられないため、この目標に最も近い設計手法はシステムエルゴノミクスデザイン (SED) 手法であり、検討後に検討されます。 XNUMX つの代替設計アプローチ。
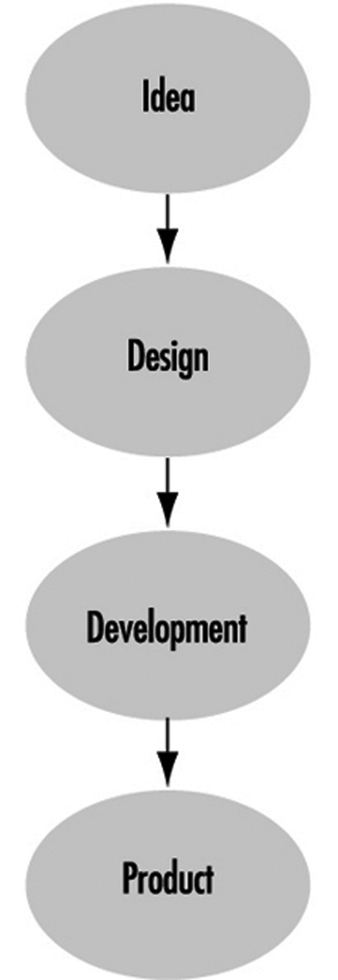
創造的なデザイン
このデザインアプローチは、オリジナリティの高い作品を制作するアーティストなどの特徴です。 この設計プロセスの本質は、コンセプトが直感的に「ひらめき」によって練り上げられ、事前に意識的に熟考することなく、問題が発生したときに対処できるようにすることです。 結果が最初のコンセプトに似ていない場合もありますが、それにもかかわらず、作成者が自分の本物の製品と見なすものを表しています. 設計が失敗することもめったにありません。 図 1 は、クリエイティブ デザインのルートを示しています。
システム設計は、論理的な順序で設計の手順を事前に決定する必要性から生じました。 設計が複雑になると、サブタスクに分割する必要があります。 したがって、デザイナーまたはサブタスク チームは相互に依存するようになり、デザインは個々のデザイナーではなくデザイン チームの仕事になります。 補完的な専門知識がチーム全体に分散され、デザインは学際的な性格を帯びています。
システム設計は、最も適切な技術を選択することにより、複雑で明確に定義された製品機能を最適に実現することを目的としています。 費用はかかりますが、組織化されていないアプローチと比較して、失敗のリスクは大幅に減少します。 設計の有効性は、PRD で策定された目標に対して測定されます。
PRD で策定された仕様の方法が最初に重要です。 図 2 は、PRD とシステム設計プロセスの他の部分との関係を示しています。

このスキームが示すように、ユーザーの入力は無視されます。 ユーザーがデザインを批判できるのは、デザイン プロセスの最後に限られます。 エラーを修正して変更を加える前に、次の設計サイクル (ある場合) を待たなければならないため、これは作成者とユーザーの両方にとって役に立ちません。 さらに、ユーザーからのフィードバックが体系化され、設計の影響として新しい PRD にインポートされることはめったにありません。
システムエルゴノミクスデザイン (SED)
SED は、設計プロセスで人的要因が確実に考慮されるように適合されたシステム設計のバージョンです。 図 3 は、PRD へのユーザー入力の流れを示しています。
 システムのエルゴノミクス設計では、人間はシステムの一部と見なされます。設計仕様の変更は、実際には認知的、身体的、精神的側面に関する作業者の能力を考慮して行われ、効率的な設計アプローチとして役立ちます。人間のオペレーターが使用されるあらゆる技術システムに。
システムのエルゴノミクス設計では、人間はシステムの一部と見なされます。設計仕様の変更は、実際には認知的、身体的、精神的側面に関する作業者の能力を考慮して行われ、効率的な設計アプローチとして役立ちます。人間のオペレーターが使用されるあらゆる技術システムに。
たとえば、労働者の身体能力の影響を調べるために、プロセスの設計におけるタスク割り当てでは、人間のオペレーターまたは機械によって実行されるタスクを慎重に選択する必要があります。各タスクは、その適性について研究されています。機械または人間の治療。 明らかに、人間の労働者は不完全な情報をより効果的に解釈できます。 ただし、マシンは準備されたデータを使用してはるかに高速に計算します。 重い荷物を持ち上げるには機械が最適です。 など。 さらに、プロトタイプの段階でユーザーとマシンのインターフェースをテストできるため、技術的な機能の段階で不意に現れる設計エラーを排除できます。
ユーザー調査の方法
「最良の」方法は存在せず、障害のある労働者のための設計が行われるべきであるという公式や確実で特定のガイドラインの情報源もありません。 それは、問題に関連する入手可能なすべての知識を徹底的に調査し、それを最も明白な最善の効果をもたらすように実装するという、むしろ常識的なビジネスです。
情報は、次のようなソースから収集できます。
- 研究成果文献.
- 職場で障害者を直接観察し、障害者の特定の仕事上の困難について説明する. そのような観察は、労働者のスケジュールの中で、労働者が疲労にさらされることが予想される時点で行う必要があります。たとえば、勤務シフトの終わりなどです。 要点は、設計上の解決策は、作業プロセスの最も困難な段階に適応させる必要があるということです。そうしないと、作業者の物理的な能力を超えたために、そのような段階が適切に (またはまったく) 実行されない可能性があります。
- インタビュー. インタビューが主観的な回答をする可能性があることに注意する必要があります。 それ自体が 誘う効果があるかもしれません。 インタビュー手法を観察と組み合わせることは、はるかに優れたアプローチです。 障害者は自分の困難について話し合うことを躊躇することがあるが、調査員が障害者のために特別な徹底を尽くそうとしていることを労働者が認識すると、彼らの寡黙さは減るだろう。 この手法は時間がかかりますが、非常に価値があります。
- アンケート. アンケートの利点は、回答者の大規模なグループに配布できると同時に、提供したい特定の種類のデータを収集できることです。 アンケート しなければなりませんただし、それが投与されるグループに関連する代表的な情報に基づいて作成されます。 これは、求められる情報のタイプは、サイズに関して合理的に制限されるべき労働者および専門家のサンプルに対して実施されたインタビューおよび観察に基づいて取得されなければならないことを意味します。 障害者の場合、そのようなサンプルの中に、障害者のための特別な補助具の処方に関与し、彼らの身体能力について検査した医師やセラピストを含めるのが賢明です.
- 身体測定. 生体計測の分野の計測器から得られた測定値 (例: 筋肉の活動レベル、特定のタスクで消費される酸素量) および人体測定法 (例: 身体要素の直線寸法、運動範囲四肢、筋力など)は人間中心のワークデザインに欠かせないものです。
上記の方法は、人々に関するデータを収集するさまざまな方法の一部です。 ユーザーマシンシステムを評価する方法も存在します。 これらのうちのXNUMXつ— —現実的な物理コピーを構築することです。 システムの多かれ少なかれ抽象的な記号表現の開発は、その例です。 モデリング. もちろん、そのような手段は、実際のシステムまたは製品が存在しない場合、または実験操作にアクセスできない場合に有用であり、必要でもあります。 シミュレーションは、トレーニング目的や研究用のモデリングによく使用されます。 あ モックアップ は、必要に応じて即興の素材で構成された、設計された職場のフルサイズの XNUMX 次元コピーであり、提案された障害のある労働者を使用して設計の可能性をテストするのに非常に役立ちます。実際、設計上の問題の大部分は、そのような装置の助け。 このアプローチのもう XNUMX つの利点は、従業員が自分の将来のワークステーションの設計に参加するにつれて、従業員のモチベーションが高まることです。
タスクの分析
タスクの分析では、定義されたジョブのさまざまな側面が分析観察の対象となります。 これらの多様な側面には、姿勢、作業操作の経路指定、他の作業員との相互作用、ツールの取り扱いと機械の操作、サブタスクの論理的順序、作業の効率性、静的条件 (作業者は長時間にわたって同じ姿勢で作業を行わなければならない場合がある) が含まれます。時間または高頻度で)、動的条件(多数のさまざまな物理的条件を必要とする)、物質的環境条件(寒い食肉処理場など)、または非物質的条件(ストレスの多い作業環境または作業自体の組織など)。
したがって、障害者のための作業設計は、完全なタスク分析と障害者の機能的能力の完全な検査に基づいている必要があります。 基本的な設計アプローチは重要な問題です。単一の設計コンセプトまたは限られた数のコンセプトを作成するよりも、偏見なく、目の前の問題に対して考えられるすべての解決策を練り上げる方が効率的です。 デザイン用語では、このアプローチは 形態学的概要. オリジナルの設計コンセプトが多数あることから、材料の使用、建設方法、技術的な製造上の特徴、操作の容易さなどに関して、それぞれの可能性の長所と短所の特徴の分析に進むことができます。 複数のソリューションがプロトタイプ段階に達し、設計プロセスの比較的遅い段階で最終決定が下されることは前例のないことではありません。
これは設計プロジェクトを実現するための時間のかかる方法のように思えるかもしれませんが、実際には、それに伴う余分な作業は、開発段階で遭遇する問題が少なくなるという点で相殺され、その結果 (新しいワークステーションまたは製品) が持つことは言うまでもありません。障害のある労働者のニーズと労働環境の緊急性との間のより良いバランスを具現化した. 残念ながら、後者の利点がデザイナーにフィードバックされることはほとんどありません。
製品要件ドキュメント (PRD) と障害
製品に関連するすべての情報が集められた後、情報源や性質に関係なく、製品だけでなく、製品に対して行われる可能性のあるすべての要求の説明に変換する必要があります。 もちろん、これらの要求はさまざまな線に沿って分割される可能性があります。 PRD には、ユーザーとオペレーターのデータ (身体測定値、可動域、筋力の範囲など)、技術データ (材料、構造、製造技術、安全基準など)、さらにはそこから生じる結論に関連する要求を含める必要があります。市場実現可能性調査の。
PRD はデザイナーのフレームワークを形成し、一部のデザイナーは、PRD を有益な挑戦ではなく、創造性の望ましくない制限と見なしています。 PRD の実行に伴う困難を考慮すると、設計の失敗は障害者に苦痛をもたらし、障害者は雇用分野で成功するための努力を放棄する可能性があることを常に心に留めておく必要があります。無効化状態の進行に対する無力な犠牲者)、および再設計のための追加費用も同様です。 この目的のために、技術設計者は障害者のための設計作業を単独で行うべきではなく、設計のフレームワークとして統合された PRD を設定するために、医学的および機能的情報を確保するために必要なあらゆる分野と協力する必要があります。
プロトタイプ試験
プロトタイプを作成したら、エラーがないかテストする必要があります。 エラーテストは、技術システムとサブシステムの観点からだけでなく、ユーザーとの組み合わせでの使いやすさの観点からも実行する必要があります。 ユーザーが身体障害者の場合は、特別な予防措置を講じる必要があります。 障害のない労働者が安全に対応できるエラーは、障害のある労働者に危害を回避する機会を与えない可能性があります。
試作試験は、PRD に適合したプロトコルに従って、少数の身体障害者 (独自の設計の場合を除く) で実施する必要があります。 このような経験的テストによってのみ、設計が PRD の要求をどの程度満たしているかを適切に判断できます。 少数の対象に関する結果は、すべてのケースに一般化できるわけではありませんが、設計者が最終的な設計または将来の設計で使用するための貴重な情報を提供します。
評価
技術システム (作業状況、機械またはツール) の評価は、ユーザーに質問したり、物理的性能に関して代替設計の比較を試みたりすることによってではなく、その PRD で判断する必要があります。 たとえば、特定の膝ブレースの設計者は、不安定な膝関節がハムストリングの反応の遅延を示すという研究結果に基づいて設計し、この遅延を補う製品を作成します。 しかし、別のブレースには異なる設計目的がある場合があります。 しかし、現在の評価方法では、どの患者にどのような条件下でどのような膝ブレースをいつ処方するかについての洞察は示されていません。これは、障害の治療において技術支援を処方する際に医療専門家が必要とする正確な洞察です。
現在の研究は、この種の洞察を可能にすることを目指しています。 技術支援を使用する必要があるかどうか、または作業現場が障害のある労働者のために適切に設計および装備されているかどうかを実際に決定する要因についての洞察を得るために使用されるモデルは、リハビリテーション技術使用可能性モデル (RTUM) です。 RTUM モデルは、既存の製品、ツール、または機械の評価に使用するフレームワークを提供しますが、図 4 に示すように、設計プロセスと組み合わせて使用することもできます。
図 4. システムの人間工学的設計アプローチと組み合わせたリハビリテーション技術使用可能性モデル (RTUM)
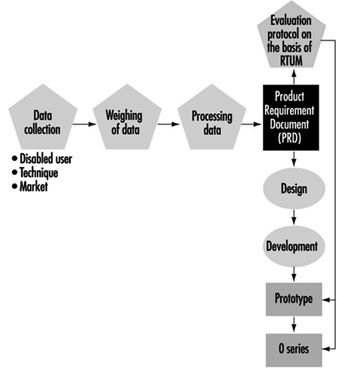
既存の製品を評価すると、技術補助具や作業現場に関して、PRD の品質が非常に悪いことがわかります。 製品要件が適切に記録されていない場合があります。 他の地域では、それらは有用な程度まで開発されていません。 設計者は、障害のあるユーザーに関連するものを含め、製品要件の文書化を開始することを学ばなければなりません。 図 4 が示すように、RTUM は SED と連携して、障害のあるユーザーの要件を含むフレームワークを提供することに注意してください。 ユーザー向けに製品を処方する責任を負う機関は、製品を販売する前に業界に製品の評価を依頼する必要があります。 図 4 はまた、製品が意図されている障害のある人またはグループの助けを借りて、(PRD で) 最終結果を適切に評価できるようにするための準備をどのように行うことができるかを示しています。 設計者がそのような設計基準を順守し、適切な規制を策定するように促すのは、国の保健機関次第です。
文化の違い
文化とテクノロジーは相互に依存しています。 技術の設計、開発、利用において文化は確かに重要な側面ですが、文化と技術の関係は非常に複雑です。 技術の設計と適用を検討するには、いくつかの観点から分析する必要があります。 Kingsley (1983) は、ザンビアでの研究に基づいて、技術的適応を、個人、社会組織、社会の文化的価値体系の XNUMX つのレベルでの変更と調整に分けています。 各レベルには、特別な設計上の考慮を必要とする強力な文化的側面があります。
同時に、テクノロジー自体は文化の不可分な部分です。 それは、全体的または部分的に、特定の社会の文化的価値を中心に構築されています。 そして文化の一部として、テクノロジーはその社会の生き方や考え方の表現になります。 したがって、技術が社会によって受け入れられ、利用され、認められるためには、技術はその社会の文化の全体像と一致している必要があります。 テクノロジーは、文化に敵対するのではなく、文化を補完するものでなければなりません。
この記事では、技術設計における文化的考慮事項に関するいくつかの複雑さを扱い、現在の問題と問題、一般的な概念と原則、およびそれらを適用する方法を調べます。
文化の定義
用語の定義 文化 何十年もの間、社会学者や人類学者の間で長々と議論されてきました。 文化は多くの用語で定義できます。 Kroeber と Kluckhohn (1952) は、1976 を超える文化の定義を検討しました。 Williams (XNUMX) が言及 文化 英語で最も複雑な単語の 1973 つとして。 文化は、人々の生活様式全体として定義されています。 そのため、社会の機能的なメンバーになるために知っておく必要のある、彼らの技術と材料の人工物が含まれます (Geertz 1974)。 それは、「人々が意味を経験し、表現するための公的に利用可能な象徴的な形式」とさえ表現されるかもしれません (Keesing 1981)。 要約すると、Elzinga と Jamison (XNUMX) は、「文化という言葉は、さまざまな知的分野や思考体系でさまざまな意味を持つ」と適切に述べています。
テクノロジー: 文化の一部と産物
テクノロジーは、文化の一部であると同時に、その製品と見なすこともできます。 60 年以上前、著名な社会学者マリノフスキーはテクノロジーを文化の一部として含め、次のように定義しました。 その後、リーチ (1965) は技術を文化的産物と見なし、「人工物、商品、および技術的プロセス」を「文化の産物」として言及しました。
技術分野では、技術製品またはシステムの設計、開発、および利用における重要な問題としての「文化」は、技術の供給者だけでなく多くの供給者によってほとんど無視されてきました。 この無視の主な理由の XNUMX つは、文化の違いに関する基本的な情報がないことです。
過去において、技術の変化は、社会生活と組織、そして人々の価値観に大きな変化をもたらしました。 産業化は、以前は農業社会だった多くの伝統的なライフスタイルに深く永続的な変化をもたらしました。これは、そのようなライフスタイルが産業労働を組織化する方法と両立しないと広く見なされていたためです。 大規模な文化的多様性の状況では、これはさまざまな否定的な社会経済的結果をもたらしました (Shahnavaz 1991)。 ある技術を社会に押し付け、広範なトレーニングを通じてそれが吸収され、利用されると信じることは、希望的観測であるということは、今や十分に確立された事実です (Martin et al. 1991)。
文化の直接的および間接的な影響を考慮し、製品をユーザーの文化的価値体系および意図する動作環境と互換性のあるものにすることは、技術設計者の責任です。
多くの「工業発展途上国」(IDC)に対するテクノロジーの影響は、効率の改善以上のものでした。 工業化は、生産とサービス部門の近代化だけではなく、社会のある程度の西洋化でもありました。 したがって、技術移転は文化移転でもあります。
テクノロジーの設計と利用の重要なパラメーターである宗教、伝統、言語に加えて、文化には、特定の製品やタスクに対する特定の態度、適切な行動のルール、エチケットのルール、タブー、習慣、習慣など、他の側面が含まれます。 最適な設計を行うには、これらすべてを等しく考慮する必要があります。
人もそれぞれの文化の産物だと言われています。 それにもかかわらず、世界の文化は歴史を通じて人間の移動のために非常に織り交ぜられているという事実は残っています. 世界には、国による違いよりも文化的な違いの方が多いのも不思議ではありません。 それにもかかわらず、デザイン全般に影響を与える可能性のある社会的、組織的、専門的な文化に基づく違いに関して、いくつかの非常に広い区別を行うことができます.
文化の影響の抑制
技術に対する文化の制約的な影響と、この問題をハードウェアおよびソフトウェア技術の設計にどのように組み込むべきかについての理論的分析と経験的分析の両方に関する情報はほとんどありません。 技術に対する文化の影響が認識されているにもかかわらず (Shahnavaz 1991; Abeysekera, Shahnavaz and Chapman 1990; Alvares 1980; Baranson 1969)、技術の設計と利用に関する文化的差異の理論的分析に関する情報はほとんどありません。 文化的多様性の重要性を定量化し、製品やシステムの設計において文化的要因をどのように考慮すべきかについて推奨する実証的研究はさらに少ない (Kedia and Bhagat 1988)。 それにもかかわらず、文化と技術は、さまざまな社会学的観点から見れば、ある程度明確に研究することができます。
文化とテクノロジー: 互換性と好み
テクノロジの適切な適用は、ユーザーの文化と設計仕様との互換性に大きく依存します。 互換性は、文化のすべてのレベル、つまり社会、組織、および職業レベルで存在する必要があります。 次に、文化的な互換性は、テクノロジーを利用する人々の好みや適性に大きな影響を与える可能性があります。 この質問には、製品またはシステムに関する好みが含まれます。 生産性と相対的効率の概念に。 変更、達成、および権限。 テクノロジーの活用方法についても同様です。 したがって、文化的価値観は、技術を選択し、使用し、制御する人々の意欲と能力に影響を与える可能性があります。 優先されるためには、互換性がなければなりません。
社会文化
すべての技術は必然的に社会文化的価値に関連付けられているため、社会の文化的受容性は、特定の技術設計が適切に機能するために非常に重要な問題です (Hosni 1988)。 人々の集合的なメンタル モデルの形成に寄与する国家文化または社会文化は、計画、目標設定、および設計仕様の定義から、生産、管理および保守システム、トレーニングおよび評価。 したがって、ハードウェアとソフトウェアの両方の技術設計は、最大限の利益を得るために、社会に基づく文化的変化を反映する必要があります。 しかし、テクノロジーの設計において考慮すべき社会的文化的要因を定義することは、非常に複雑な作業です。 Hofstede (1980) は、国家ベースの文化の XNUMX つの次元の枠組みのバリエーションを提案しました。
- 弱い不確実性回避と強い不確実性回避. これは、あいまいな状況を回避したいという人々の願望と、この目的に役立つための正式な手段(規則や規制など)を社会がどの程度開発しているかに関係しています。 Hofstede (1980) は、たとえば、日本やギリシャなどの国に高い不確実性回避スコアを与え、香港やスカンジナビアに低いスコアを与えました。
- 個人主義対集団主義. これは、社会における個人と組織との関係に関係しています。 個人主義社会では、各人が自分の利益を守ることが期待されるような方向付けが行われます。 対照的に、集団主義の文化では、人々の間の社会的結びつきは非常に強い. 個人主義的な国の例としては、米国と英国が挙げられますが、コロンビアとベネズエラは集団主義の文化を持っていると見なすことができます。
- 小電力対大電力距離. 大きな「権力の距離」は、社会とその組織のヒエラルキーと同様に、力の弱い個人が文化における権力の不平等な分配を受け入れる文化を特徴付けます。 大国間の距離の例は、インドとフィリピンです。 スウェーデンやオーストリアなどの国では、電源距離が小さいのが一般的です。
- 男らしさと女らしさ. 物質的な成果をより重視する文化は、前者のカテゴリーに属すると見なされます。 生活の質やその他の目に見えない結果を重視する人は、後者に属します。
Glenn and Glenn (1981) はまた、特定の国民文化における「抽象的」傾向と「連想的」傾向を区別しました。 連想文化の人々(アジアの人々のような)が認知問題に取り組むとき、彼らは文脈をより重視し、グローバルな思考アプローチを採用し、さまざまな出来事の間の連想を利用しようとする. 一方、西洋社会では、合理的思考のより抽象的な文化が優勢です。 これらの文化的側面に基づいて、Kedia と Bhagat (1988) は、技術移転に対する文化的制約を理解するための概念モデルを開発しました。 彼らは、さまざまな国の文化的多様性とテクノロジーに関する受容性に関する情報を提供する、さまざまな記述的な「命題」を開発しました。 確かに、多くの文化は、これらのカテゴリーのいずれかに適度に傾いており、いくつかの混合した特徴を含んでいます.
技術の設計と利用に関する消費者と生産者の視点は、社会文化の影響を直接受けます。 消費者を保護するための製品安全基準、および生産者を保護するための作業環境規制、検査および施行システムは、社会文化と価値観を大きく反映しています。
組織文化
企業の組織、その構造、価値体系、機能、行動などは、主に企業が活動する社会の文化的産物です。 これは、組織内で起こっていることは、ほとんどが外部社会で起こっていることを直接反映していることを意味します (Hofstede 1983)。 IDC で活動している多くの企業の一般的な組織は、技術を生産する国の特性と、技術を受容する環境の特性の両方の影響を受けています。 ただし、特定の組織における社会文化の反映はさまざまです。 組織は自分たちの文化の観点から社会を解釈し、その制御の程度は、他の要因の中でも、技術移転のモードに依存します。
今日の組織の性質の変化に加えて、多文化的で多様な労働力を考えると、適切な組織プログラムを適応させることは、運用を成功させるためにこれまで以上に重要です (労働力の多様性管理プログラムの例は、Solomon (1989) で説明されています)。
職業文化
特定の専門分野に属する人々は、特定の方法でテクノロジーを使用する場合があります。 ウィクストローム等。 (1991) は、ハンド ツールの開発を目的としたプロジェクトで、設計者がプレート シェアをどのように保持して使用するか (つまり、グリップを前方に保持し、ツールを自分の体から遠ざける方法) を想定しているにもかかわらず、次のように指摘しています。プロのブリキ職人は、図 1 に示すように、プレート シェアを逆の方法で保持および使用していました。彼らは、ツールの特性に関する関連情報を取得するために、ユーザー集団自体の実際のフィールド条件でツールを調査する必要があると結論付けました。
図 1. プロのブリキ職人によるプレート シェア ツールの実際の使用 (リバース グリップ)

最適な設計のための文化的特徴の使用
前述の考慮事項が示唆するように、文化はアイデンティティと自信を提供します。 それは、「ヒューマンテクノロジーシステム」の目的と特徴、および与えられた環境でそれがどのように動作するべきかについての意見を形成します。 そして、どの文化においても、技術の進歩に関して価値のある機能が常にいくつかあります。 これらの特徴を考慮してソフトウェアやハードウェアの技術を設計すれば、社会への技術吸収の原動力となります。 1982 つの良い例は、儒教と仏教の影響を大きく受けた東南アジアのいくつかの国の文化です。 前者は、とりわけ学習と忠誠を強調し、新しい概念を吸収できることを美徳と見なします。 後者は、調和の重要性と仲間の人間への敬意を教えています。 これらの独特の文化的特徴は、日本人が提供した高度なハードウェアと組織技術の吸収と実装のための適切な環境の提供に貢献したと言われています (Matthews XNUMX)。
したがって、巧妙な戦略は、人間工学的なアイデアや原則を促進する際に、社会の文化の肯定的な特徴を最大限に活用するでしょう. McWhinney (1990) によれば、「出来事を理解し、投影に効果的に使用するには、物語に埋め込まなければならない。 創業のエネルギーを解き放ち、社会や組織を抑圧的な特性から解放し、それが自然に流れる道を見つけるために、さまざまな深さまで行かなければなりません。 . . . 計画も変更も、物語に意識的に組み込むことなく効果を発揮することはできません。」
経営戦略の設計における文化的評価の良い例は、日本における品質保証のための「1989 つのツール」手法の実装です。 「七つの道具」とは、武士が戦いに出る際に必ず携行しなければならない最低限の武器です。 「品質管理サークル」の先駆者たちは、彼らの XNUMX つの勧告を日本の環境に適応させ、「XNUMX つのツール」という馴染みのある用語を利用して、すべての従業員が品質作業に関与することを奨励するために、この数を減らしました。戦略 (Lillrank and Kano XNUMX)。
ただし、他の文化的特徴は技術開発に有益ではない場合があります。 女性に対する差別、カースト制度の厳格な遵守、人種またはその他の偏見、または一部の仕事を品位を下げるものと見なすことは、技術開発に悪影響を及ぼす可能性があるいくつかの例です。 一部の伝統的な文化では、男性が主要な賃金労働者であると期待されています。 彼らは、女性の役割を、監督者としては言うまでもなく、平等な従業員として見なすことに慣れており、鈍感であったり、敵意さえ持っています。 女性に平等な雇用機会を差し控え、女性の権限の正当性を疑問視することは、人材の最適な活用を必要とする組織の現在のニーズには適切ではありません。
タスクの設計と仕事の内容に関して、一部の文化では、肉体労働やサービスなどのタスクを品位を落とすものと見なしています。 これは、「主従関係」に関する植民地時代に関連した過去の経験に起因する可能性があります。 他のいくつかの文化では、「汚れた手」に関連する仕事や職業に対して強い偏見が存在します. これらの態度は、これらの職業の平均よりも低い賃金表にも反映されています。 その結果、これらは技術者の不足または不十分な保守リソースの原因となっています (Sinaiko 1975)。
通常、新しい技術に関して文化的価値観を変えるには何世代にもわたる時間がかかるため、ハードウェアとソフトウェアの設計において文化の違いを考慮して、技術を技術の受容者の文化に適合させる方が費用対効果が高くなります。
製品およびシステム設計における文化的考慮事項
今では、テクノロジーがハードウェアとソフトウェアの両方で構成されていることは明らかです。 ハードウェア コンポーネントには、工業製品、機械、設備、建物、職場、物理的なレイアウトなどの資本財と中間財が含まれ、そのほとんどは主にマイクロ 人間工学の領域に関係しています。 ソフトウェアは、プログラミングと計画、管理と組織の手法、管理、保守、トレーニングと教育、文書化とサービスに関連しています。 これらの懸念はすべて、マクロ人間工学の見出しに分類されます。
ミクロおよびマクロの人間工学的観点から特別な設計上の考慮が必要な文化的影響の例をいくつか以下に示します。
マイクロエルゴノミクスの問題
マイクロエルゴノミクスは、「使用可能な」ユーザー-マシン-環境インターフェイスを作成することを目的とした製品またはシステムの設計に関係しています。 製品設計の主要なコンセプトはユーザビリティです。 このコンセプトには、製品の機能性と信頼性だけでなく、安全性、快適性、楽しさの問題も含まれます。
ユーザーの内部モデル (つまり、ユーザーの認知モデルまたはメンタル モデル) は、ユーザビリティ デザインにおいて重要な役割を果たします。 システムを効率的かつ安全に操作または制御するには、ユーザーは使用中のシステムの正確な代表的な認知モデルを持っている必要があります。 Wisner (1983) は、「したがって、工業化には多かれ少なかれ新しい種類のメンタル モデルが必要になるだろう」と述べています。 この見解では、正式な教育と技術訓練、経験、文化は、適切な認知モデルの形成を決定する上で重要な要素です。
Meshkati (1989) は、1984 年の Union Carbide Bhopal 事故のミクロおよびマクロの人間工学的要因を研究する際に、インドの運転員の不適切なプラント運転のメンタル モデルに対する文化の重要性を強調しました。 彼は、問題の一部は、「文化的および心理社会的属性だけでなく、教育的背景が大きく異なる他の人間によって設計された高度な技術システムを使用する、訓練が不十分な第三世界のオペレーターのパフォーマンス」に起因する可能性があると述べた. 実際、マイクロインターフェイス レベルでの設計の使いやすさの多くの側面は、ユーザーの文化に影響されます。 ユーザーの認識、行動、および好みを注意深く分析することで、効果的で受け入れられる製品またはシステムを設計するためのユーザーのニーズと要件をよりよく理解することができます。
これらの文化に関連するマイクロエルゴノミクスの側面のいくつかは次のとおりです。
- インターフェース設計. 人間の感情は、製品設計の不可欠な要素です。 色や形などの要素に関係しています (Kwon, Lee and Ahn 1993; Nagamachi 1992)。 色は、製品デザインに関して人間の感情に関係する最も重要な要素と見なされています。 製品の色処理は、国によって異なるユーザーの心理的および感情的な傾向を反映しています。 色の象徴性も異なる場合があります。 たとえば、西側諸国では危険を示す赤色は、インドでは縁起の良いトークンであり (Sen 1984)、中国では喜びや幸福を象徴しています。
- 公共施設のさまざまな用途で使用される絵文字やシンボルは、文化に強く関連しています。 たとえば、西洋の絵画情報は、非西洋人には解釈が難しい (Daftuar 1975; Fuglesang 1982)。
- 制御・表示の互換性. 互換性は、制御、表示動作、または概念的関係の空間的な動きが、人間の期待にどれだけ適合しているかの尺度です (Staramler 1993)。 これは、製品またはシステムを安全かつ効率的に操作するための基本的な人間工学的問題である、刺激と反応の関係に対するユーザーの期待を指します。 互換性のあるシステムとは、人々の一般的な知覚運動行動 (つまり、集団ステレオタイプ) を考慮するシステムです。 ただし、他の人間の行動と同様に、知覚運動行動も文化の影響を受ける可能性があります。 Hsu と Peng (1993) は、XNUMX バーナー ストーブの制御/バーナーの関係について、アメリカと中国の被験者を比較しました。 異なる人口ステレオタイプ パターンが観察されました。 彼らは、おそらく読書やスキャンの習慣の違いの結果として、コントロール/バーナーのリンクに関する人口の固定観念は文化的に異なっていたと結論付けています.
- 職場のデザイン. 産業用ワークステーションの設計は、有害な姿勢を排除し、ユーザーの生物学的ニーズ、好み、およびタスク要件に関連してユーザーのパフォーマンスを向上させることを目的としています。 異なる文化圏の人々は、異なるタイプの座る姿勢や仕事の高さを好むかもしれません. 欧米諸国では、最大の快適さと効率を得るために、作業高さは座った肘の高さ近くに設定されています。 しかし、世界の多くの地域では、人々は床に座っています。 たとえば、インドの労働者は、立ったり椅子に座ったりするよりも、しゃがんだりあぐらをかいて座ったりすることを好みます。 実際、椅子が用意されている場合でも、オペレーターはシートにしゃがんだり、足を組んで座ったりすることを好むことが観察されています。 Daftuar (1975) と Sen (1984) は、インドの座位姿勢のメリットと意味を研究しました。 床に座ることのさまざまな利点を説明した後、Sen は次のように述べています。この上。" したがって、オペレータの効率と快適性を向上させるために、好ましい姿勢のバリエーションを機械と作業場の設計で考慮する必要があります。
- 保護具の設計. 防護服の着用に関しては、心理的および物理的な制約が存在します。 たとえば、一部の文化では、防護服の使用を必要とする仕事は、熟練していない労働者にのみ適した一般的な労働と見なされる場合があります。 その結果、保護具は通常、そのような環境の職場でエンジニアが着用することはありません。 身体的制約に関して、一部の宗教グループは、宗教によって頭を覆うことを義務付けられており (インドのシーク教徒のターバンやイスラム教徒の女性の頭を覆うものなど)、保護用のヘルメットなどを着用するのが難しいと感じています。 したがって、作業環境の危険から人々を保護する際に、このような文化的多様性に対処するために、特別な設計の防護服が必要です。
マクロエルゴノミクスの問題
マクロエルゴノミクスという用語は、ソフトウェア技術の設計を指します。 それは、組織と管理システムの適切な設計に関係しています。 文化、社会政治的条件、教育レベルの違いにより、先進国で開発された多くの成功した管理および組織の方法が発展途上国にうまく適用できないことを示す証拠が存在します (Negandhi 1975)。 ほとんどの IDC では、組織内の権限構造のダウンフローを特徴とする組織階層が一般的です。 民主主義や意思決定における権力分担などの西洋の価値観はほとんど考慮されていませんが、これらは現代の経営において重要な問題と見なされており、知性、創造性、問題解決能力、および創意工夫に関する人材の適切な活用に不可欠です。
社会階層の封建制度とその価値体系は、開発途上国のほとんどの産業職場でも広く実践されています。 これらは、参加型管理アプローチ(柔軟な専門化と労働力の動機付けの新しい生産モードに不可欠です)を困難な取り組みにします. しかし、これらの文化においても自律的な作業システムを導入することが望ましいことを確認する報告があります (Ketchum 1984)。
- 参加型人間工学. 参加型人間工学は、さまざまな仕事関連の問題を解決するための有用なマクロ人間工学アプローチです (Shahnavaz、Abeysekera、および Johansson 1993; Noro および Imada 1991; Wilson 1991)。 このアプローチは主に先進国で使用されており、実装されている組織文化に応じてさまざまな形で適用されてきました。 Liker、Nagamachi、Lifshitz (1988) の研究では、労働者の身体的ストレスを軽減することを目的として、米国の XNUMX つの製造工場と日本の XNUMX つの製造工場で参加型人間工学プログラムを比較しました。 彼らは、「効果的な参加型エルゴノミクス プログラムはさまざまな形をとることができる。 あらゆる文化のあらゆる植物に最適なプログラムは、独自の歴史、構造、文化に依存する可能性があります。」
- ソフトウェアシステム. 新しいソフトウェア システムを設計したり、組織に変更を導入したりする際には、社会的および組織的な文化に基づく違いを考慮する必要があります。 情報技術に関して、De Lisi (1990) は、ネットワークが既存の組織文化に適合しない限り、ネットワーク機能は実現されないことを示しています。
- 作業組織と管理. 一部の文化では、家族は非常に重要な機関であり、仕事の組織化において重要な役割を果たしています。 たとえば、インドの一部のコミュニティでは、仕事は一般的に家族の責任と見なされ、家族全員が共同で遂行します (Chapanis 1975)。
- メンテナンス体制. 保守プログラムの設計 (予防と定期の両方) とハウスキーピングは、作業組織を文化的制約に適応させる必要がある分野の他の例です。 多くの IDC で優勢な種類の農業社会の伝統的な文化は、一般に、産業労働の要件および活動の組織化方法と両立しません。 従来の農業活動では、たとえば、正式なメンテナンス プログラミングや精密作業は必要ありません。 ほとんどの場合、時間のプレッシャーの下では実行されません。 現場では、通常、メンテナンスやハウスキーピング作業を自然のリサイクル プロセスに任せています。 したがって、産業活動のためのメンテナンスプログラムとハウスキーピングマニュアルの設計では、これらの文化的制約を考慮に入れ、適切なトレーニングと監督を提供する必要があります。
Zhang と Tyler (1990) は、米国企業 (エセックス社) が提供する中国での近代的な電話ケーブル製造施設の設立の成功に関する事例研究で、次のように述べています。または、文化的、哲学的、および政治的な違いのために、エセックスの管理慣行は必ずしも実用的でも望ましいものでもありませんでした。 したがって、Essex が提供する情報と指示は、中国のパートナーによって、中国に存在する状況に適合するように変更されることがよくありました。」 彼らはまた、文化的、経済的、政治的な違いにもかかわらず、成功の鍵は、両者の共通の目標への献身とコミットメント、そして互いの違いを超えた相互の尊重、信頼、友情であると主張しました.
シフトと勤務スケジュールの設計は、勤務体制の他の例です。 ほとんどの IDC では、交替勤務に関連する特定の社会文化的問題があります。 これらには、劣悪な生活環境や住宅条件、支援サービスの欠如、騒がしい家庭環境、および特別なシフト プログラムの設計が必要なその他の要因が含まれます。 さらに、女性労働者の場合、通常、XNUMX 日の労働時間は XNUMX 時間よりもはるかに長くなります。 実際の労働時間だけでなく、旅行、在宅勤務、子供や高齢者の世話に費やす時間も含まれます。 一般的な文化を考慮して、シフトおよびその他の作業設計には、効果的な運用のために特別な勤務と休憩のスケジュールが必要です。
中国人労働者の昼食後の昼寝やイスラム教徒の宗教活動などの文化的差異を許容する勤務スケジュールの柔軟性は、労働組織のさらなる文化的側面です。 イスラム文化では、人々は一日に数回仕事を休んで祈り、毎年日の出から日没までの XNUMX か月間断食する必要があります。 これらすべての文化的制約には、特別な作業組織上の考慮事項が必要です。
このように、多くのマクロエルゴノミクス デザイン機能は、文化の影響を強く受けています。 これらの機能は、効果的な運用のためのソフトウェア システムの設計で考慮する必要があります。
結論: デザインにおける文化の違い
使いやすい製品やシステムを設計するのは簡単なことではありません。 適合性の絶対的な品質は存在しません。 人間とテクノロジーのシステムの XNUMX つの基本コンポーネント (ユーザー、タスク、テクノロジー システム、操作環境) の間で最適かつ調和のとれた相互作用を生み出すことは、設計者の仕事です。 システムは、ユーザー、タスク、および環境条件の XNUMX つの組み合わせに対しては完全に使用可能ですが、別の組み合わせにはまったく適していない場合があります。 単一の製品であろうと複雑なシステムであろうと、デザインの使いやすさに大きく貢献できるデザインの側面の XNUMX つは、ユーザーと操作環境の両方に大きな影響を与える文化的側面の考慮です。
良心的なエンジニアが特定の環境で使用するための適切なヒューマン マシン インターフェースを設計したとしても、その設計者は、異なる文化が製品の使いやすさに与える影響を予測できないことがよくあります。 製品が設計された環境とは異なる環境で使用された場合に起こりうる負の文化的影響を防ぐことは困難です。 また、文化的制約に関する定量的データはほとんど存在しないため、エンジニアが文化的要因に関してデザインを互換性のあるものにする唯一の方法は、デザイン プロセスにユーザー集団を積極的に統合することです。
デザインにおける文化的側面を考慮する最善の方法は、デザイナーがユーザー中心のデザイン アプローチを採用することです。 確かに、設計者が採用した設計アプローチは、設計されたシステムのユーザビリティに即座に影響を与える重要な要素です。 この基本概念の重要性は、製品またはシステムの設計者が設計ライフ サイクルの最初の段階で認識し、実装する必要があります。 したがって、ユーザー中心設計の基本原則は次のように要約できます (Gould and Lewis 1985; Shackel 1986; Gould et al. 1987; Gould 1988; Wang 1992):
- ユーザーに早期かつ継続的に焦点を当てる. ユーザーは、製品開発ライフ サイクル全体 (つまり、設計前、詳細設計、製造、検証、および製品改良の段階) を通じて、設計チームのアクティブなメンバーである必要があります。
- 統合設計. システムは全体として考慮し、全体的な設計アプローチを確保する必要があります。 これは、システムの使いやすさのすべての側面が、設計チームによって並行して進化する必要があることを意味します。
- 初期および継続的なユーザーテスト. ユーザーの反応は、開発の初期段階から最終製品まで、実際の環境で実際の作業を行いながら、プロトタイプまたはシミュレーションを使用してテストする必要があります。
- 反復設計. 満足のいくユーザビリティの結果が得られるまで、設計、テスト、および再設計を定期的なサイクルで繰り返します。
グローバル規模で製品をデザインする場合、デザイナーは世界中の消費者のニーズを考慮しなければなりません。 この場合、ユーザー中心の設計アプローチを採用するために、実際のすべてのユーザーおよび動作環境にアクセスできない場合があります。 設計者は、参考文献、標準、ガイドライン、実用的な原則、および設計の分析評価を行う際の経験など、公式および非公式の幅広い情報を使用する必要があり、製品に十分な調整可能性と柔軟性を提供する必要があります。より幅広いユーザー層のニーズを満たすために。
考慮すべきもう XNUMX つのポイントは、設計者がすべてを知っているわけではないという事実です。 ユーザーだけでなく、管理者、技術者、修理および保守担当者など、プロジェクトに関係する他の関係者からの意見も必要です。 参加型プロセスでは、関係者は、使用可能な製品またはシステムの開発に関する知識と経験を共有し、その機能と安全性に対する共同責任を受け入れる必要があります。 結局のところ、関係者全員が何かを抱えています。
高齢労働者
高齢労働者の状態は機能状態によって異なり、それ自体が過去の職歴に影響されます。 彼らの地位は、彼らが占める職場、および彼らが住んでいる国の社会的、文化的、経済的状況にも依存します。
したがって、多くの肉体労働を行わなければならない労働者は、ほとんどの場合、学校教育や職業訓練が最も少ない労働者でもあります。 彼らは、病気を引き起こす可能性のある過酷な労働条件にさらされ、事故の危険にさらされています。 これに関連して、彼らの身体能力は活動的な人生の終わりに向かって低下する可能性が非常に高く、事実、彼らは職場でより脆弱になります.
逆に、長期にわたる学校教育、その後の職業訓練の恩恵を受けた労働者は、一般的に、こうして得た知識を活用し、徐々に経験を広げることができる職業訓練を行っています. 多くの場合、彼らは最も有害な職業環境で働くことはなく、彼らのスキルは年をとるにつれて認められ、評価されます。
景気拡大と人手不足の時代にあって、高齢化した労働者は「仕事に対する誠実さ」の資質を持ち、定期的に仕事をこなし、ノウハウを維持できると認識されています。 不況と失業の時代には、彼らの仕事のパフォーマンスが若い人々の能力に及ばないという事実と、仕事の技術と組織の変化に適応する能力の低下がより強調されるでしょう.
関係国、その文化的伝統、経済発展の様式とレベルによっては、高齢労働者への配慮と彼らとの連帯が多かれ少なかれ明らかであり、彼らの保護は多かれ少なかれ確実である.
年齢/仕事関係の時間次元
高齢化と仕事との関係は非常に多様な状況をカバーしており、これは XNUMX つの観点から考えることができます。一方で、仕事は労働者の活動的な生涯を通じて、労働者にとって変化要因であるように見えます。 (例:消耗、スキルの低下、病気や事故)またはポジティブ(例:知識や経験の獲得)。 一方、仕事は年齢に関連する変化を明らかにし、その結果、能力の低下に対して大きすぎる仕事の要求にさらされている年配の労働者は、疎外され、生産システムから排除されることさえあります。仕事の内容が経験に高い価値を置くようなものである場合、彼らの職業経歴。
したがって、加齢は、仕事の内外で、人生の出来事が年代順に登録される「ベクトル」の役割を果たします。 この軸の周りには、衰退と構築のヒンジ付きプロセスがあり、これはワーカーごとに非常に異なります. 作業状況の設計において高齢化労働者の問題を考慮するためには、年齢に関連する変化の動的特性と、これらの変化の個人間のばらつきの両方を考慮する必要があります。
年齢と仕事の関係は、次の XNUMX つの進化に照らして考えることができます。
- 仕事は進化する. テクニックは変わります。 機械化、自動化、コンピュータ化、および情報伝達の方法は、他の要因の中でも特に、より一般化される傾向があるか、またはより一般化される傾向にあります。 新しい製品が登場し、他の製品は消えます。 新しいリスクが明らかになったり、拡大したりしますが (放射線や化学製品など)、他のリスクは目立たなくなります。 作業組織、労務管理、タスクの配分、および作業スケジュールが変換されます。 発展する生産部門もあれば、衰退する生産部門もあります。 世代を超えて、労働者の活動的な生活の中で遭遇する労働状況、彼らが行う要求、および彼らが必要とするスキルは同じではありません。
- 労働人口の変化. 年齢構成は、人口動態の変化、就労手段や退職手段、雇用に対する態度に応じて変更されます。 労働人口に占める女性の割合は進化し続けています。 教育、職業訓練、医療制度へのアクセスの分野で真の激変が起きています。 これらすべての変化は同時に、年齢と仕事の関係に明らかに影響を与え、ある程度予測できる世代関連および期間関連の効果を生み出しています。
- 最後に――強調すべき点――個人の変化は、自分の職業生活を通じて進行しているしたがって、特定の仕事の特徴とそれを実行する人々の特徴との間の調整がしばしば問題視されます。
有機老化のプロセスと仕事との関係
仕事に関わる主要な器官機能は、40 歳または 50 歳から観察可能な方法で低下し、そのうちのいくつかは 20 歳または 25 歳までに発達します。
特に、年齢とともに最大筋力や関節可動域の低下が見られます。 筋力の低下は15~20歳で20~60%程度ですが、これはあくまでも全体的な傾向であり、個人差はかなりあります。 さらに、これらは最大容量です。 身体的要求が中程度の場合、低下ははるかに少なくなります。
年齢に非常に敏感な機能の XNUMX つは、姿勢の調節です。 この困難は、一般的で安定した作業姿勢 (立位または座位) ではあまり明白ではありませんが、正確な調整、強い筋肉の収縮、または極端な角度での関節の動きを必要とする不均衡の状況では明らかになります。 これらの問題は、作業が不安定または滑りやすいサポートで実行されなければならない場合、または作業者が衝撃や予期せぬ衝撃を受けた場合に、より深刻になります。 その結果、年齢とともにバランスの喪失による事故がより頻繁になる。
睡眠調節は、40 歳から 45 歳以降では信頼性が低くなります。 勤務スケジュールの変化(夜勤や交替勤務など)や不快な環境(騒音や照明など)に対してより敏感です。 睡眠の長さと質の変化が続きます。
体温調節も年齢とともに難しくなり、特に肉体的に激しい作業を行わなければならない場合、高齢の労働者は暑い中での作業に関して特定の問題を抱えています.
感覚機能は非常に早い段階で影響を受け始めますが、結果として生じる欠陥が 40 歳から 45 歳になる前に顕著になることはめったにありません。視覚機能全体が影響を受けます。調節の振幅が減少します (これは適切なレンズで矯正できます)。 、また周辺視野においても、奥行きの知覚、まぶしさに対する耐性、および水晶体を通る光の透過。 結果として生じる不都合は、特定の条件でのみ顕著になります。照明が不十分な場合、まぶしい光源の近くにある場合、オブジェクトやテキストのサイズが非常に小さい場合、または表示が不適切な場合などです。
聴覚機能の低下は、高周波(高音)の聴力閾値に影響を与えますが、特に騒がしい環境での音信号の識別が困難になることで明らかになります。 したがって、周囲の騒音や強い反響があると、話された言葉の聞き取りが難しくなります。
一般に、他の感覚機能は、人生のこの時期にはほとんど影響を受けません。
一般的に、年齢に伴う有機的な衰退は、特に極端な状況で顕著であることがわかります。いずれにせよ、若年労働者でさえも困難を避けるために修正する必要があります。 さらに、高齢の労働者は、労働条件と組織が許せば、多くの場合経験に基づいて習得される特定の戦略によって不足を補うことができます。 、他の手段の中でも特に有用な情報を特定するために視覚的なスキャンを整理します。
認知老化: 減速と学習
認知機能に関して、最初に注意すべきことは、仕事活動は一方では情報を受け取り処理するための基本的なメカニズムをもたらし、他方では生涯を通じて獲得した知識をもたらすということです。 この知識は主に、物、信号、言葉、状況の意味 (「宣言的」知識)、および物事のやり方 (「手続き的」知識) に関係しています。
短期記憶は、検出された有用な情報を数十秒または数分間保持することを可能にします。 この情報の処理は、永続的に記憶されている知識と比較することによって実行されます。 老化は、これらのメカニズムにさまざまな方法で作用します。(1) 経験のおかげで、特にかなり頻繁に実行されるタスクにおいて、有用な知識とそれを処理する方法の両方を最良の方法で選択する能力が知識を豊かにします。 (2) この情報を処理するのにかかる時間は、中枢神経系の老化と、より壊れやすい短期記憶の両方のために長くなります。
これらの認知機能は、労働者が住んでいた環境に大きく依存しているため、過去の歴史、訓練、直面しなければならなかった労働状況に大きく依存しています。 したがって、年齢とともに発生する変化は、衰退と再構築の現象の非常に多様な組み合わせとして現れ、これら XNUMX つの要因のそれぞれが多かれ少なかれ強調される可能性があります。
労働者が職業生活の過程で短い訓練しか受けておらず、比較的単純で反復的な作業を実行しなければならなかった場合、彼らの知識は限られており、新しい作業や比較的慣れていない作業に直面したときに困難を感じる. さらに、彼らが著しく時間的な制約の下で仕事をしなければならない場合、彼らの感覚機能に生じた変化と彼らの情報処理の遅さは彼らにハンディキャップを与えるでしょう. 一方、もし彼らが長い学校教育と訓練を受け、様々な仕事を遂行しなければならなかったならば、彼らはそれによって彼らのスキルを向上させることができたので、年齢に関連する感覚や認知の欠陥は.大幅に補償されます。
このように、高齢者の就労状況を継続的に教育することの役割は容易に理解できる。 仕事の変化に伴い、定期的なトレーニングを利用することがますます必要になっていますが、年配の労働者はほとんど受けていません。 特に学習障害は年齢とともに増加すると考えられているため、企業は、活動的な人生の終わりに近づいている労働者にトレーニングを提供する価値があるとは考えないことがよくあります。 また、労働者自身も訓練を受けることを躊躇し、成功しないのではないかと恐れ、訓練から得られる利益を常に明確に認識しているとは限りません。
実際、年齢とともに、学習方法は変更されます。 若い人は自分に伝えられた知識を記録しますが、年配の人は、この知識が自分がすでに知っていること、その論理とは何か、仕事の正当性との関係でどのように構成されているかを理解する必要があります。 学ぶ時間も必要です。 したがって、高齢労働者の訓練の問題に対する XNUMX つの対応策は、まず第一に、各人の年齢、知識、経験に応じて、特に高齢者の訓練期間を長くして、さまざまな教育方法を使用することです。
働く男女の高齢化
男性と女性の年齢差は、65 つの異なるレベルで見られます。 有機的なレベルでは、平均余命は一般に男性よりも女性の方が長いが、障害のない平均余命と呼ばれるものは男女で非常に近く、最大で 70 歳から 30 歳である。 その年齢を超えると、女性は一般的に不利になります。 さらに、女性の最大身体能力は男性よりも平均で XNUMX% 小さく、この差は年齢が上がるにつれて持続する傾向がありますが、XNUMX つのグループの変動性は大きく、XNUMX つの分布の間にはいくつかの重複があります。
仕事のキャリアのレベルでは、大きな違いがあります。 平均して、女性は男性よりも仕事を始めたときの職業訓練が少なく、必要な資格が少ないポストに就くことが多く、仕事のキャリアはあまりやりがいがありません。 したがって、年齢とともに、時間的制約や仕事の反復性など、かなりの制約のあるポストを占めています。 年齢による認知能力の発達における性差は、この仕事の社会的状況を参照せずに確立することはできません.
労働状況の設計がこれらの性差を考慮に入れるものである場合、特に女性の初期および継続的な職業訓練と、女性の経験を増やし、女性の価値を高める職業キャリアの構築を支持する行動をとらなければなりません。 したがって、この行動は彼らの活発な生活が終わるかなり前に行われなければなりません。
労働人口の高齢化:集合データの有用性
労働人口の高齢化に関して集団的かつ定量的なアプローチを採用する理由は、少なくとも XNUMX つあります。 第一の理由は、ワークショップ、サービス、企業、セクター、または国における老化の影響を評価および予測するために、そのようなデータが必要になるということです。 XNUMX 番目の理由は、老化の主な構成要素は、それ自体が確率に左右される現象であるということです。つまり、すべての労働者が同じように、または同じ速度で老化するわけではありません。 したがって、老化のさまざまな側面が時々明らかにされ、確認され、評価されるのは、統計ツールによるものです。
この分野の最も単純な手段は、年齢構造とその進化の記述であり、経済部門、貿易、仕事のグループなど、仕事に関連する方法で表現されます。
たとえば、ある職場の人口の年齢構成が安定しており、若いままであることを観察した場合、年齢に関して選択的な役割を果たすことができる仕事の特徴を尋ねることができます。 逆に、この構造が安定していて古い場合、職場は会社の他の部門から人々を受け入れる機能を持っています。 このような動きの理由は研究する価値があり、この職場での仕事が高齢化する労働力の特性に適しているかどうかも同様に検証する必要があります。 最後に、ある年から別の年への採用レベルを単純に反映して、年齢構成が定期的に変化する場合、おそらく人々は「現場で年をとる」という状況になります。 特に年間の採用数が減少傾向にあり、全体的な構造がより高い年齢層にシフトする場合は特に、特別な調査が必要になることがあります。
労働条件、労働者が現在占有しているポスト、および(可能であれば)労働者がもはや占有していないポストに関する定量的データがあれば、これらの現象の理解を深めることができます。 作業スケジュール、作業の反復性、身体的要求の性質、作業環境、および特定の認知要素でさえ、質問 (労働者に尋ねられる) または評価 (専門家による) の対象となる可能性があります。 そうすれば、現在の仕事と過去の仕事の特徴と、関係する労働者の年齢との間の関係を確立することができ、労働条件が特定の年齢で生じ得る選択メカニズムを解明することができる.
これらの調査は、労働者の健康状態に関する情報も取得することでさらに改善できます。 この情報は、労働災害率や病気欠勤率などの客観的な指標から導き出すことができます。 しかし、これらの指標は、仕事に関連している可能性のある健康状態を実際に反映しているものの、労働災害や病気による欠勤に関係するすべての人々の戦略も反映しているため、方法論に関してかなりの注意を払う必要があります。医師はこの点に関してさまざまな戦略を立てることができ、これらの戦略が労働者の年齢と無関係であるという保証はありません。 したがって、年齢間のこれらの指標の比較はしばしば複雑です。
したがって、可能であれば、労働者による健康の自己評価から生じるデータ、または健康診断で得られたデータに頼る必要があります。 これらのデータは、予測と予防のために、年齢とともに変化する有病率をよりよく知る必要がある疾患に関連している可能性があります。 しかし、老化の研究は、特定の種類の機能低下など、病気の段階に達していない状態の評価に何よりも依存します。または、特定の種類の困難または無力でさえあります(たとえば、高いステップに乗る、正確な動きをする、ぎこちない位置で平衡を維持するなど)。
したがって、年齢、仕事、健康に関するデータを関連付けることは、有用であると同時に複雑な問題でもあります。 それらを使用することで、さまざまなタイプの接続を明らかにする (またはそれらの存在を推定する) ことができます。 それは単純な因果関係のケースかもしれません.年齢が上がるにつれて、仕事のいくつかの要件が機能状態の一種の低下を加速させます. しかし、これは最も頻繁なケースではありません。 非常に多くの場合、私たちは同時にその効果を理解するように導かれる 累積 同時に、健康状態が悪化した労働者が特定の種類の仕事から除外される可能性があることに応じた選択メカニズムの影響 (疫学者が「健康な労働者効果」と呼ぶもの) 」)。
このようにして、この一連の関係の健全性を評価し、精神生理学の分野で特定の基本的な知識を確認し、何よりも、職場での老化に関する予防戦略を考案するのに役立つ情報を得ることができます.
いくつかのタイプのアクション
高齢労働者に悪影響を与えることなく雇用を維持するために講じられる行動は、いくつかの一般的な方針に従わなければなりません。
- この年齢層を別のカテゴリと見なしてはなりませんが、代わりに、年齢を活動人口の多様性の XNUMX つの要因と見なす必要があります。 あまりに的を絞ったり、強調しすぎたりする保護措置は、関係する人々の立場を疎外し、弱体化させる傾向があります。
- すべきである 予想する 年齢に関連する個人的および全体的な変化、および仕事の技術と組織の変化。 人的資源の管理は、仕事のキャリアとトレーニングの適切な調整を準備するために、時間をかけてのみ効果的に実行できます。 作業状況の設計では、利用可能な技術的および組織的な解決策と、関係する(将来の)人口の特性を同時に考慮することができます。
- 仕事のキャリアと状況において同等の多様性の条件を作り出すために、職業生活全体にわたる個人の発達の多様性を考慮に入れるべきである。
- スキルを構築するプロセスを優先し、衰退のプロセスを軽減することに注意を払う必要があります。
これらのいくつかの原則に基づいて、いくつかのタイプの即時アクションを最初に定義できます。 行動の最優先事項は、高齢労働者にとって特に深刻な問題を引き起こす可能性のある労働条件に関するものです。 前述のように、姿勢によるストレス、極度の運動、厳しい時間の制約 (例: 組立ライン作業やより高い出力目標の強制など)、有害な環境 (温度、騒音) または不適切な環境 (照明条件)、夜勤および交替勤務作品は一例です。
高齢労働者が占有している(または占有している可能性がある)ポストのこれらの制約を体系的に特定することで、目録を作成し、行動の優先順位を確立することができます。 この特定は、経験的な検査チェックリストによって実行できます。 労働者の活動を分析することも同様に有用であり、これにより労働者の行動の観察を労働者の困難についての説明と関連付けることができます。 これらの XNUMX つのケースでは、努力または環境パラメーターの測定は、観測を完了する可能性があります。
この特定以外に取るべき行動はここでは説明できません。なぜなら、それは明らかにそれぞれの作業状況に固有のものだからです。 基準の使用は有用な場合もありますが、老化の特定の側面を考慮した基準はほとんどなく、それぞれが特定の領域に関係しているため、研究中の活動の各要素について孤立した方法で考える傾向があります。
高齢化を考慮に入れることは、当面の対策とは別に、仕事の状況を設計する際に可能な限り幅広い柔軟性を実現することに向けられた、より長期的な考え方を意味します。
そのような柔軟性は、作業状況と機器の設計において最初に求められる必要があります。 限られたスペース、調整不可能なツール、厳格なソフトウェア、要するに、タスクの実行において人間の多様性の表現を制限する状況のすべての特性は、かなりの割合の高齢労働者を不利にする可能性が非常に高い. 同じことが、より制約的なタイプの組織にも当てはまります。完全に事前に決定されたタスクの配分、頻繁で緊急の締め切り、または多すぎる、または厳しすぎる注文 (もちろん、これらは、品質に関連する必須要件がある場合には許容されなければなりません)。生産または設備の安全性)。 したがって、そのような柔軟性の探求は、高齢労働者の生産システムへの統合を成功させるのを容易にすることができる、さまざまな個人的および集団的調整の探求です。 これらの調整を成功させるための条件の XNUMX つは、明らかに、すべての年齢の労働者に提供され、特定のニーズに合わせた職業訓練プログラムを確立することです。
したがって、作業状況の設計において高齢化を考慮に入れることは、一連の調整された行動 (極度のストレスの全体的な削減、作業組織のためのすべての可能な戦略の使用、およびスキルを向上させるための継続的な努力) を伴いますが、これらはいっそう効率的ですが、なおさらです。それらが長期にわたって引き継がれ、事前に慎重に検討されている場合、高価です。 人口の高齢化は、適切な予防措置が完全に実行可能であるためには、十分にゆっくりとした予見可能な現象です。
もっと...
特別なニーズを持つ労働者
障害者のためのデザインは、すべての人のためのデザイン
市場には非常に多くの製品があり、それらの製品が一般的なユーザー集団に不適切であることを容易に明らかにしています。 太った人や妊婦が快適に入れるには狭すぎる戸口をどのように評価すべきでしょうか? 機械的機能のすべての関連テストを満たしている場合、その物理設計に欠陥があると見なされますか? 確かに、そのようなユーザーは、完全な健康状態にある可能性があるため、物理的な意味で障害があると見なすことはできません。 一部の製品は、意図したとおりに機能させる前にかなりの取り扱いが必要です。特定の安価な缶切りが思い浮かびますが、まったく簡単ではありません。 しかし、そのようなデバイスの操作が困難な健康な人は、身体障害者であると見なす必要はありません。 人間と製品との相互作用をうまく取り入れたデザイナーは、自分のデザインの機能的有用性を高めます。 優れた機能設計がない場合、軽度の障害を持つ人々は、深刻な障害を負う立場に置かれる可能性があります。 したがって、設計の価値を決定するのは、ユーザーとマシンのインターフェイスです。 を ユーザー。
テクノロジーが人間に役立つために存在することを思い出すのは自明の理です。 その使用は、自分の能力を拡大することです。 障害者の場合、この拡張はさらにいくつかのステップを踏む必要があります。 たとえば、1980 年代には、身体障害者用のキッチンの設計に多くの注意が払われました。 この作業で得られた経験は、「通常の」キッチンの設計機能に浸透しました。 この意味での障害者は先駆者と見なされるかもしれません。 職業に起因する機能障害や障害は、新しい職場で非常に一般的な座りがちな作業に限定された人々が被る筋骨格やその他の苦情を考慮する必要がありますが、同様に、そのような状態の再発を防止するだけでなく、すでに仕事関連の障害に苦しんでいる労働者のニーズに合わせたユーザー互換技術の開発。
より広い平均的な人
設計者は、少数の代表的でない母集団に焦点を当てるべきではありません。 特定のグループの間では、それらの間の類似性に関する仮定を楽しませることは最も賢明ではありません. たとえば、大人になってから何らかの形で怪我をした労働者は、人体計測的に、それ以外の場合は同等の健康な人と必ずしもそれほど異なるとは限らず、大まかな平均の一部と見なすことができます。 そのように負傷した幼い子供は、筋肉と機械の発達が前の成長段階によって着実かつ順次影響を受けるため、大人としてはかなり異なる人体測定を示します. (90 つのケースに関して、大人があえて比較可能性について結論を出す必要はありません。それらは、95 つの別個の特定のグループと見なされなければならず、XNUMX つのみが大まかな平均に含まれます。)たとえば、人口の XNUMX% である場合、このマージンをたとえば XNUMX% に増やすには、わずかに大きな労力を費やす必要があります。要点は、このようにして特定のグループ向けの設計の必要性を減らすことができるということです。
より広い平均的な集団向けの設計にアプローチするもう 38 つの方法は、46 つの製品を作成することです。それぞれの製品は、人間の違いの 46 つのパーセンタイルの極値に適合するように大まかに設計されています。 たとえば、54 つのサイズの椅子を作成できます。XNUMX つはブラケットで高さを XNUMX ~ XNUMX cm に調整でき、もう XNUMX つは XNUMX ~ XNUMX cm です。 XNUMX つのサイズのペンチが既に存在します。XNUMX つは平均的なサイズの男性の手にフィットし、もう XNUMX つは平均的な女性の手や小柄な男性の手にフィットします。
職場を分析し、労働者にとってより適したものにするために、毎年適度な金額を確保することは、会社の方針として賢明であり、過度の身体的負荷による病気や障害を防ぐことができます. また、経営陣が積極的に職場環境を改善しようとしていることを理解すると、労働者のモチベーションが高まります。さらに、徹底的な作業分析、モックアップの構築、人体測定、さらには労働者のためのユニットの特定の設計。 実際、ある会社では、ユニットがあまりにも立ちっぱなしという形で身体的過負荷を引き起こし、座った位置に関連する不適切な寸法があり、他の欠陥もあったため、すべての職場でユニットを再設計する必要があるという結論に達しました。 .
デザインのコスト、メリット、使いやすさ
コスト/ベネフィット分析は、経済的なもの以外の人間工学的政策の結果についての洞察を得るために、人間工学者によって開発されています。 今日、産業および商業の領域での評価には、労働者に対する政策の負または正の影響が含まれます。
品質とユーザビリティを評価する方法は、現在活発な研究の対象となっています。 図 1 に示すように、リハビリテーション技術ユーザビリティ モデル (RTUM) は、リハビリテーション技術内での製品のユーザビリティを評価するためのモデルとして利用し、そのユーザビリティを決定する製品のさまざまな側面を明らかにすることができます。
図 1. リハビリテーション技術の有用性モデル (RTUM)

厳密に経済的な観点から、特定のタスクを実行できる、または特定の製品を製造できるシステムを作成するためのコストを指定できます。 これらの条件では、各企業が投資に対する最大の利益に関心を持っていることに言及する必要はほとんどありません。 しかし、労働者の身体的、認知的、精神的システムのさまざまな働きを考慮に入れるとき、金銭的投資に関連する作業遂行と製品製造の実際のコストをどのように決定できるでしょうか? 実際、人間のパフォーマンス自体の判断は、とりわけ、何をしなければならないかについての労働者の認識、それを行うことに対する彼ら自身の価値観、および会社に対する彼らの意見に基づいています。 実際、この文脈における価値の規範は、仕事に対する本質的な満足であり、この満足は、会社の目的とともに、自分のパフォーマンスの理由を構成します。 このように、労働者の幸福とパフォーマンスは、仕事に対する態度とパフォーマンスの最終的な質を決定する幅広い経験、関連性、認識に基づいています。これは、RTUM モデルが前提としている理解に基づいています。
もしこの見方を受け入れないなら、投資は疑わしい不明確な結果に関連してのみ考える必要があります。 人間工学者や医師が障害者の作業環境を改善したい場合、つまり機械の操作からより多くの生産性を高め、使用するツールの使いやすさを向上させたい場合、財政的投資を正当化する方法を見つけるのに困難に直面するでしょう. 典型的には、そのような正当化は、仕事によるけがや病気の予防によって実現される貯蓄に求められてきました。 しかし、病気の費用が会社ではなく国によって負担された場合、いわば財政的に見えなくなり、仕事に関連しているとは見なされません。
それにもかかわらず、健全な労働環境への投資はお金の有効活用であるという認識が高まってきており、無能力者の「社会的」コストは、国の経済にとって最終的なコストとして換算可能であり、潜在的な労働者が労働者になるとその価値が失われるという認識が高まっています。社会に何の貢献もせずに家にいる。 職場への投資 (ワークステーションの改造、特別な道具の提供、あるいは個人の衛生面の支援など) は、仕事の満足度に報いるだけでなく、自立し、社会的支援から独立できるようにするのに役立ちます。
障害者にとって職場への特別な介入が正当化されるかどうかを判断するために、費用便益分析を行うことができる。 以下の要因は、そのような分析の対象となるデータのソースを表しています。
1.人員
- 不在。 障害のある労働者は十分な出勤記録を持っていますか?
- 特別なタスクの指導に追加費用が発生する可能性はありますか?
- 人事異動は求められますか? それらのコストも考慮する必要があります。
- 事故補償率の上昇は見込めますか?
2。 安全性
- 障害のある労働者のために検討されている仕事には、安全規制が含まれますか?
- 特別な安全規則が含まれますか?
- 事故の頻度が高い、または事故に近い仕事ですか?
3。 医療の
- 職場への再就職を目的として検査を受けている障害のある労働者に関しては、障害の性質と深刻度を評価しなければならない。
- 障害のある労働者の欠勤の程度も考慮に入れなければなりません。
- 労働者の「マイナーな」症状の特徴と頻度はどのようなもので、どのように対処すべきか? 労働者の効率を妨げる可能性のある関連する「軽度の」病気の将来の発展を予見することはできますか?
仕事から失われた時間に関しては、これらの計算は、賃金、間接費、補償、および生産損失の観点から行うことができます。 今述べたような分析は、組織が、障害のある労働者が仕事に戻った方が良いかどうか、組織自体が彼または彼女の仕事に戻ることで利益を得られるかどうかについて、十分な情報に基づいた決定に達することができる合理的なアプローチを表しています。
前述の説明では、より広い人口を対象とした設計は、使いやすさとそのような設計のコストと利点に関連する特定の設計に重点を置くことによって、注目を集めてきました。 すべての関連要素を含めて必要な計算を行うことは依然として困難な作業ですが、現在、モデリング手法を手法に組み込む研究努力が続けられています。 オランダやドイツなどの一部の国では、政府の政策により、企業は仕事に関連した人身傷害に対してより責任を負うようになっています。 規制政策と保険構造の根本的な変化は、明らかに、この種の傾向から生じると予想されます。 これらの国では、職場で障害を負うような事故に遭った労働者には、適応したワークステーションを提供するか、会社内で他の仕事を行うことができるようにすることが、多かれ少なかれ確立されたポリシーになっています。労働者の人道的な扱いにおける真の成果を無効にしました。
機能能力が制限された労働者
デザインが障害者を対象とするか、より広い平均を対象とするかに関係なく、研究データの不足によって妨げられています。 障害者は、実質的に研究努力の対象ではありませんでした。 したがって、製品要件ドキュメント (PRD) を設定するには、観察と測定によってそのデータを収集するために、特定の実証研究を実施する必要があります。
障害のある労働者または使用者について必要な情報を収集する際には、障害者の現在の機能状態だけでなく、慢性疾患の進行の結果である可能性のある変化を予測する試みを行う必要があります。 実際、この種の情報は、労働者から直接引き出すことも、医療専門家が提供することもできます。
例えば、労働者の体力に関するデータが関連する作業行為を設計する場合、設計者は、障害者が発揮できる最大の強度を仕様として選択することはありません。労働者の状態が悪化する可能性があります。 したがって、労働者は、自分用に調整または設計された機械やツールを、作業ステーションで引き続き使用することができます。
さらに、設計者は人体の極端な操作を含む設計を避ける必要があります。たとえば、体の一部の可動域の範囲では、設計を中間範囲に適応させる必要があります。 この原則の単純だが非常に一般的な例を次に示します。 キッチンやオフィスのキャビネットや机の引き出しの非常に一般的な部分は、小さな棚の形をしたハンドルで、指を下に置き、引き出しを開くために上向きおよび前方の力を加えます. この操作には、手首の 180 度の回外 (手のひらを上に向けた状態) が必要です。これは、手首のこの種の動きの範囲の最大点です。 この状態は、引き出しが軽い力で開くことができ、ぎこちなく配置されていない限り、健康な人には問題がないかもしれませんが、引き出しの動きがきつい場合や完全に 180 度回外した場合は負担になります。不可能であり、障害者にとって不必要な負担です。 ハンドルを垂直に配置するという単純な解決策は、機械的にはるかに効率的であり、人口の大部分がより簡単に操作できるようになります。
身体機能能力
以下では、運動系、神経系、およびエネルギー系によって定義される、身体機能能力の制限の XNUMX つの主な領域について説明します。 設計者は、次の身体機能の基本原則を考慮することで、ユーザー/ワーカーの制約の性質についてある程度の洞察を得ることができます。
移動システム. これは、骨、関節、結合組織、筋肉で構成されています。 関節構造の性質によって、可能な可動域が決まります。 たとえば、膝関節は、股関節や肩関節とは異なる程度の可動性と安定性を示します。 これらのさまざまな関節の特性によって、腕、手、足などで可能なアクションが決まります。 筋肉にもさまざまな種類があります。 それは筋肉の種類であり、筋肉が XNUMX つまたは XNUMX つの関節を通過するかどうかであり、特定の身体部分の動きの方向、速度、発揮できる強さを決定するのは筋肉の位置です。 .
この方向、速度、および強度を特徴付けて計算できるという事実は、設計において非常に重要です。 障害者の場合、筋肉の「正常な」位置が乱され、関節の可動域が変化したことを考慮する必要があります。 たとえば切断では、筋肉が部分的にしか機能しないか、その位置が変化している可能性があるため、患者の身体能力を慎重に調べて、どの機能が残っているか、およびそれらがどれほど信頼できるかを確認する必要があります. 事例の歴史が続きます。
40 歳の大工が事故で親指と右手の薬指を失いました。 大工の仕事の能力を回復するために、外科医は患者の足の親指の XNUMX つを取り除き、失われた親指をそれと交換しました。 リハビリ期間の後、大工は仕事に戻りましたが、XNUMX 時間から XNUMX 時間以上継続して仕事をすることが不可能であることがわかりました。 彼の道具は研究され、彼の手の「異常な」構造に適合しないことが判明しました。 リハビリの専門家は、「再設計された」手をその新しい機能的能力と形状の観点から検討し、変更された手に対してより適切で使いやすい新しいツールを設計することができました. これまで重かった手の負担が軽減され、長時間の作業が可能になりました。
神経系. 神経系は、位置や機械的、化学的、その他に関連する体の構成要素の側面に関する情報を解釈することによって、人の動きや行動を開始し、管理することを目的とした、データ収集装置を備えた非常に洗練された制御室と比較することができます。州。 このシステムには、是正措置を提供するフィードバック システム (痛みなど) だけでなく、平衡状態を維持するために予測的にそれ自体を表現する「フィードフォワード」機能も組み込まれています。 転倒や危険な機械部品との接触から身を守るために、反射的に姿勢を戻そうとする作業員の場合を考えてみましょう。
障害者では、情報の生理学的処理が損なわれる可能性があります。 視覚障害者のフィードバックとフィードフォワード メカニズムの両方が弱体化しているか、存在しません。聴覚障害者の間では、音響レベルでも同じことが当てはまります。 さらに、重要な管理回路はインタラクティブです。 音声信号は、視覚信号の助けを借りて、筋肉や関節から収集されたデータを介して、私たちの体を空間に配置する固有受容回路と連携して、人の平衡に影響を与えます. 脳は、これらのシステムの非常に劇的な欠陥を克服するように機能し、情報のコーディングのエラーを修正し、不足している情報を「埋める」ことができます. 確かに、特定の制限を超えると、無能力が優先されます。 XNUMX つのケース履歴が続きます。
ケース1。 36 歳の女性が自動車事故で脊髄を損傷しました。 彼女は補助なしで座ることができ、車椅子を手動で動かすことができます。 彼女の体幹は安定しています。 しかし、彼女の足の感覚はなくなりました。 この欠陥には、温度変化を感知できないことが含まれます。
彼女は自宅で座って仕事をしています (キッチンは彼女が座って作業できるように設計されています)。 足の温度情報を処理できないため、やけどに気付かない可能性があるため、お湯で足を火傷するリスクが最小限に抑えられるように、十分に隔離された位置にシンクを設置するという安全対策が講じられています。
ケース2。 左半身麻痺のXNUMX歳男児が母親に入浴されていた。 玄関の呼び鈴が鳴り、母親は男児を残して玄関先まで行き、湯の蛇口をひねった男児はやけどを負った。 安全上の理由から、お風呂にはサーモスタットが装備されている必要がありました(できれば、男の子がオーバーライドできないもの)。
エネルギーシステム。 人体が肉体労働を行わなければならない場合、比較的非効率的ではあるが、生理学的変化、特に筋肉細胞内の相互作用の形で起こる. 人間の「運動」は、エネルギー供給の約 25% のみを機械的活動に変換し、残りのエネルギーは熱損失を表します。 したがって、人間の体は重労働には特に適していません。 疲労は一定時間後に始まり、重労働を行わなければならない場合は、予備のエネルギー源が利用されます. これらの予備エネルギー源は、作業が非常に迅速に実行される場合、突然 (ウォームアップ期間なしで) 開始される場合、または激しい運動を伴う場合に常に使用されます。
人間の生体は、好気的(血流中の酸素を介して)および嫌気的(好気性酸素を枯渇させた後、筋肉組織に蓄えられた小さいながらも重要なエネルギーの予備単位を必要とします)でエネルギーを獲得します。 職場での新鮮な空気供給の必要性は、酸素の使用に関する議論の焦点を好気性側に自然に引き寄せます。定期的に嫌気性プロセスを呼び出すほど激しい作業条件は、ほとんどの職場、少なくとも先進国では非常にまれです。国。 人間の有酸素機能に直接関係する大気中の酸素の利用可能性は、いくつかの条件の関数です。
- 周囲気圧 (約 760 torr、または海面で 21.33 kPa)。 高所作業のパフォーマンスは、酸素欠乏の影響を大きく受ける可能性があり、そのような状況にある労働者にとって最も重要な考慮事項です。
- 重労働を行う労働者の場合、空気供給を確実にリフレッシュするために換気が必要であり、XNUMX 分間に呼吸する空気の量を増やすことができます。
- 周囲の酸素は、拡散によって肺胞を介して血流に入ります。 血圧が高くなると、拡散面が拡大し、それによって血液の酸素容量が増加します。
- 組織への酸素拡散が増加すると、拡散表面が増加し、その結果、酸素レベルが増加します。
- 特定の心臓の問題を抱えている人は、心拍出量が増加すると(酸素レベルと一緒に)、血液循環が筋肉に有利に変化すると苦しみます.
- 酸素とは対照的に、グルコース、特に脂肪は大量に蓄えられているため、エネルギー源 (「燃料」) を外部から継続的に供給する必要はありません。 重労働で使用されるのは、エネルギー値の高いブドウ糖だけです。 より軽い作業では脂肪が要求されますが、その割合は個人によって異なります。 簡潔で一般的な病歴が続きます。
肺に影響を与える病気である喘息または気管支炎を患っている人は、労働者の仕事に深刻な制限をもたらします。 このワーカーの作業割り当ては、物理的な負荷などの要因に関して分析する必要があります。 環境も分析する必要があります。きれいな周囲空気は、労働者の福利に大きく貢献します。 さらに、負荷のピークを避けて、XNUMX 日を通してワークロードのバランスを取る必要があります。
特定のデザイン
ただし、場合によっては、特定の設計や非常に小さなグループ向けの設計が必要な場合もあります。 このような必要性は、実行するタスクと障害者が経験している困難が過度に大きい場合に発生します。 必要な特定の要件が、市場で入手可能な製品で作成できない場合 (たとえ改造しても)、特定の設計が答えです。 この種の解決策が費用がかかるか安価であるかにかかわらず (人道的問題は別として)、それにもかかわらず、実行可能性と会社の存続可能性へのサポートを考慮して検討する必要があります。 特別に設計された職場は、障害のある労働者がそこで何年も働くことを楽しみにできる場合、および彼または彼女が行う仕事が生産面で会社の資産である場合にのみ、経済的に価値があります。 そうでない場合、労働者は実際に自分の仕事に対する権利を主張するかもしれませんが、リアリズムの感覚が優先されるべきです。 このようなデリケートな問題には、コミュニケーションの協力による解決を求める精神で取り組む必要があります。
特定の設計の利点は次のとおりです。
- デザインはオーダーメイドです。解決すべき問題に完璧にフィットします。
- そのように奉仕された労働者は、仕事と社会参加の生活に戻ることができます。
- 労働者は、福祉とは無関係に、自給自足することができます。
- 代替案に含まれる人事異動のコストが回避されます。
特定の設計の欠点は次のとおりです。
- 大人数はおろか、一人でも使われそうにないデザインです。
- 特定の設計には多くの場合、費用がかかります。
- 特別にデザインされた製品は、多くの場合手作りでなければなりません。 マスメソッドによる節約は、ほとんどの場合実現できません。
ケース1。 たとえば、車椅子の受付係が発話に問題を抱えていたケースがあります。 彼女の発話が困難なため、会話がかなり遅くなりました。 会社は小さいままでしたが、問題は発生せず、彼女はそこで何年も働き続けました。 しかし、会社が拡大すると、彼女の障害が問題になり始めました。 彼女はもっと速く話し、かなり速く動き回らなければなりませんでした。 彼女は新しい要求に対処できませんでした。 しかし、彼女の問題に対する解決策が模索され、XNUMX つの選択肢にたどり着きました。いくつかの仕事の質を低下させた欠陥を補うために、特別な技術的設備を設置するか、単純に特定の作業を含む一連の仕事を選択するかです。より多くの机上のワークロード。 彼女は後者のコースを選択し、現在も同じ会社で働いています。
ケース2。 テクニカル ドローイングの作成を職業とする若い男性が、浅瀬でのダイビングにより、高レベルの脊髄損傷を負いました。 彼の怪我は、彼が日常のすべての活動に助けを必要とするほど深刻です。 それにもかかわらず、コンピューター支援設計 (CAD) ソフトウェアの助けを借りて、彼は製図で生計を立てることができ続け、パートナーと経済的に独立した生活を送っています。 彼の作業スペースは彼のニーズに合わせた書斎であり、彼はコンピューター、電話、ファックスでやり取りする会社で働いています。 彼のパソコンを操作するには、キーボードに特定の調整を加える必要がありました。 しかし、これらの技術的資産により、彼は生計を立て、自分自身を養うことができます。
上記のように、特定の設計のアプローチは他の設計と変わりません。 設計プロジェクト中に発生する可能性がある唯一の克服できない問題は、純粋に技術的な理由だけでは設計目標を達成できない、つまり実行できないということです。 例えば、パーキンソン病に苦しむ人は、病状の進行のある段階で、後ろ向きに転倒する傾向があります。 もちろん、そのような不測の事態を防ぐための支援策は、望ましい解決策となるでしょうが、最先端の技術では、そのような装置をまだ構築することはできません。
人間工学に基づいたシステム設計と特別な身体的ニーズを持つ労働者
損傷した機能を回復するために医学的に介入することで身体障害を治療することはできますが、身体障害、つまりタスクを遂行する能力の欠如の治療は、医学的専門知識と比較してはるかに未発達な手段を必要とする可能性があります. 障害の治療の必要性に関する限り、障害の重さはそのような決定に強く影響します。 しかし、治療が求められていることを考えると、次の手段を単独または組み合わせて、設計者または管理者が利用できる選択肢を形成します。
- タスクを除外する
- 作業要素の実行における労働者の不足を、機械または他の人の助けを使用して補うこと
- タスク順序の差別化、つまり、タスクをより管理しやすいサブタスクに分割する
- タスクで使用されるツールの変更
- ツールと機械の特別な設計。
特定の人間工学的観点から、障害の治療には以下が含まれます。
- タスクの修正
- ツールの修正
- 新しいツールまたは新しい機械の設計。
有効性の問題は、常にツールまたは機械の変更の出発点であり、多くの場合、問題の変更に費やされるコスト、対処する必要がある技術的特徴、および新しい設計で具現化する機能の変更に関連しています。 . 快適さと魅力は、これらの他の特性の中で決して無視できない性質です。
工具や機械の設計変更に関する次の考慮事項は、その装置がすでに一般的な使用のために設計されたものであるか (この場合、既存の製品に変更が加えられることになります)、それとも個人で設計されることになるかです。障害の種類を考慮します。 後者の場合、労働者の障害の各側面について、特定の人間工学的考慮が払われなければならない。 たとえば、脳卒中後の脳機能の制限に苦しんでいる労働者を考えると、失語症 (コミュニケーションの困難)、麻痺した右腕、上向きの動きを妨げる脚の痙性麻痺などの障害には、次の調整が必要になる場合があります。
- 作業者が通信できるようにするパーソナル コンピューターまたはその他のデバイス
- 残りの便利なアームで操作できるツール
- 障害のある足の機能を回復し、患者の歩行能力の損失を補うのに役立つ義足システム。
障害のある労働者のためにどのように設計するかという質問に対する一般的な答えはありますか? システムのエルゴノミクス デザイン (SED) アプローチは、このタスクに非常に適しています。 作業状況または問題となっている製品の種類に関する調査では、障害のある労働者の特別なグループまたは特定の方法で障害のある個々のユーザーのユニークなケースに関連する特別な情報を収集する目的で設計チームが必要です。 設計チームは、多様な有資格者を含むことにより、設計者だけに期待される技術的な種類を超えた専門知識を所有しています。 それらの間で共有される医学的および人間工学的知識は、厳密に技術的な知識と同じくらい完全に適用されます。
障害のあるユーザーに関連するデータを収集することによって決定される設計上の制約は、健康なユーザーに関連する対応するデータと同じ客観性と同じ分析精神で扱われます。 後者の場合と同様に、障害者の個人的な行動パターン、人体測定プロファイル、生体力学的データ (リーチ、強さ、可動域、ハンドリング スペース、身体的負荷など)、人間工学的基準を決定する必要があります。および安全規則。 しかし、残念なことに、障害のある労働者のために行われた研究はほとんどないことを認めざるを得ません。 人体測定に関するいくつかの研究があり、人工装具や装具の分野における生体力学に関する研究はいくらかありますが、身体的負荷能力に関する研究はほとんど行われていません。 (読者は、この章の最後にある「その他の関連資料」リストで、そのような資料への参照を見つけることができます。) そして、そのようなデータを収集して適用するのは簡単な場合もありますが、多くの場合、その作業は困難であり、実際には不可能です。 . 確かに、研究に利用できる障害者の数が少ないことを考えると、客観的なデータを取得する必要があります。 しかし、この分野のデザインと研究に対するそのような貢献の重要性を強く意識しているため、共有する機会が与えられたどんな研究にも喜んで参加することがよくあります。 したがって、それは彼ら自身のためだけでなく、より大きな障害者コミュニティへの投資でもあります。
ダイヤモンド製造におけるシステム設計
著者は、E. メッサー氏と W. ローリグ教授の生体力学的および設計面への貢献、H. スタイン教授と R. ランガー博士の、研磨の生理学的側面の支援に感謝します。処理する。 この研究は、イスラエルの労働社会問題省の労働安全衛生研究予防委員会からの助成金によって支援されました。
ダイヤモンド研磨業界における手動作業台の設計と作業方法は、何百年も変わっていません。 ダイヤモンド研磨者の職業上の健康に関する研究では、手と腕の筋骨格障害、特に肘の尺骨神経障害の割合が高いことが確認されています。 これらは、この手作業の集中的な職業の実践において上半身に課せられる高い筋骨格要求によるものです. テクニオン イスラエル工科大学で実施された研究では、ダイヤモンド研磨業界の職人の安全問題に関連する人間工学的側面と職業病の調査が行われました。 操作的な動きに対する需要が高いこの業界でのタスクには、頻繁かつ迅速な手の運動を必要とする動きが含まれます。 イスラエルのダイヤモンド産業で 1989 年から 1992 年にかけて実施された疫学的調査では、ダイヤモンド研磨で経験した操作的な動きが、非常に頻繁に労働者の上肢や背中の上下に深刻な健康問題を引き起こすことが指摘されています。 このような職業上の危険が労働者に影響を与えると、最終的に業界の経済にも影響を与える連鎖反応が生じます。
何千年もの間、ダイヤモンドは魅力、美しさ、豊かさ、資本的価値の対象でした. 熟練した職人や芸術家は、硬質炭素結晶形成のこの独特な形の形と価値を高めることによって、時代を超えて美を創造しようと試みてきました. 天然石を使った芸術的創造の継続的な成果と偉大な国際産業の出現とは対照的に、いくつかの疑わしい労働条件を改善するためにほとんど何もされていません. 英国、南アフリカ、イスラエルのダイヤモンド博物館を調査した結果、伝統的な研磨作業場が何百年も変わっていないという歴史的結論を導き出すことができます。 典型的なダイヤモンド研磨ツール、作業台、および作業プロセスは、Vleeschdrager (1986) によって説明されており、すべての研磨設定に普遍的に共通していることがわかっています。
ダイヤモンド製造のセットアップで行われた人間工学的評価は、作業姿勢による背中の痛みや首や腕のストレスを引き起こす研磨ワークステーションの工学的設計の大きな欠如を示しています。 ダイヤモンド研磨の専門職に関与するモーション パターンのマイクロモーション研究と生体力学的分析は、非常に激しい手と腕の動きを示しており、これには高加速、素早い動き、短い周期での高度な反復性が含まれます。 ダイヤモンド研磨者の症状調査では、研磨者の 45% が 40 歳未満であり、若くて健康な集団であるにもかかわらず、64% が肩の痛み、36% が上腕の痛み、27% が痛みを訴えていることが示されました。下腕に。 研磨作業は、振動する研磨ディスクに加えられる大量の「手作業による」圧力の下で行われます。
ダイヤモンド研磨ワークステーションに関する最初の既知の説明は、1568 年にイタリアの金細工師、ベンヴェヌート チェッリーニによって次のように記されています。 チェッリーニの説明は、今日でも書かれている可能性があります。人間のオペレーターの役割は、この 400 年間変わっていません。 作業ルーチン、手動ツール、およびプロセスに含まれる決定の性質を調べると、ユーザーとマシンの関係もほとんど変わっていないことがわかります。 この状況は、自動化、ロボット工学、およびコンピューター システムの参入によって大きな変化が起こったほとんどの業界で独特です。 これらは、今日の世界における労働者の役割を完全に変えました。 しかし、研磨作業サイクルは、研磨技術が始まったヨーロッパだけでなく、ファンシージオメトリを専門とする米国、ベルギー、イスラエルの高度な施設であるかどうかにかかわらず、世界中のほとんどの産業で非常に似ていることがわかっています。より価値の高いダイヤモンド製品、またはインド、中国、タイの施設では、一般的に人気のある形状と中価格帯の製品を生産しています。
研磨プロセスは、研磨ディスクの表面に付着したダイヤモンド ダスト上で固定された原石ダイヤモンドを研磨することに基づいています。 その硬度のため、同様の炭素材料との摩擦による研磨のみが、ダイヤモンドの形状を幾何学的で輝かしい仕上げに操作するのに効果的です。 ワークステーション ハードウェアは、ワークステーション メカニズムとハンドヘルド ツールという 1950 つの基本的な要素グループで構成されています。 第1のグループは電気モーターを含み、おそらく単一の直接駆動によって、垂直円筒軸上で研磨ディスクを回転させる。 研磨ディスクを取り囲む頑丈で平らなテーブル。 ベンチシートと光源。 ハンドヘルド操作ツールは、すべての研磨段階で原石を収納するダイヤモンド ホルダー (またはタング) で構成され、通常は左手の手のひらに保持されます。 作品は右手の人差し指、人差し指、薬指で凸レンズを持ち、左目で拡大されます。 この操作方法は、ほとんどの場合利き手が考慮されていない厳密なトレーニング プロセスによって課せられます。 作業中、ポリッシャーはリクライニング姿勢をとり、ホルダーを研磨ディスクに押し付けます。 この姿勢では、手を安定させるために作業台で腕を支える必要があります。 その結果、尺骨神経は解剖学的な位置にあるため、外部の損傷を受けやすくなっています。 このような怪我は、ダイヤモンド研磨作業者の間で一般的であり、450,000 年代から職業病として受け入れられてきました。 今日、世界中の研磨業者の数は約 75 人であり、そのうちの約 80% は、過去 XNUMX 年間でダイヤモンド産業を劇的に拡大した極東、主にインドに位置しています。 研磨作業は手作業で行われ、ダイヤモンドの各ファセットは、石の形状の特定の部分に関して訓練を受け、熟練した研磨師によって作成されます。 ポリッシャーは、業界全体の労働力の約 XNUMX% を構成する、ダイヤモンド クラフト フォースの明らかな過半数です。 したがって、この業界の職業上のリスクのほとんどは、ダイヤモンド研磨ワークステーションの操作を改善することで対処できます。
研磨に関連する動作パターンの分析は、研磨ルーチンが XNUMX つのサブルーチンで構成されていることを示しています。基本的なダイヤモンド研磨操作を表す研磨サイクルと呼ばれるより単純なルーチンと、最終検査を含むファセット サイクルと呼ばれるより重要なルーチンです。ホルダー内の石の位置の変更。 全体的な手順には、次の XNUMX つの基本的な作業要素が含まれます。
- 研磨。 これが実際の研磨作業です。
- 検査。 数秒ごとに、オペレーターは拡大鏡を使用して、研磨されたファセットの進行状況を視覚的に検査します。
- ドップ調整員t。 ダイヤモンド ホルダーのヘッド (ドップ) に対して角度調整が行われます。
- ストーンチェンジ. ダイヤモンドを所定の角度で回転させてファセットを変更する行為。 ダイヤモンドのファセットを研磨するには、これら 25 つの要素を約 1993 回繰り返す必要があります。 このような繰り返しの回数は、オペレーターの年齢、石の硬度と特性、時間帯 (オペレーターの疲労による) などの側面に依存します。 平均して、各繰り返しには約 XNUMX 秒かかります。 研磨プロセスと使用された方法論で実行された微動研究は、Gilad (XNUMX) によって提供されています。
研磨と検査の XNUMX つの要素は、比較的静的な作業姿勢で実行されますが、いわゆる「研磨する手」(H から P) および「検査する手」(H から I) のアクションでは、肩の短くて速い動きが必要です。 、肘と手首。 両手の実際の動きのほとんどは、肘の屈曲と伸展、および肘の回内と回外によって行われます。 体の姿勢 (背中と首) と手首のずれを除くすべての動きは、通常の作業では比較的変化しません。 四角い断面の鋼棒で構成されたストーンホルダーは、血管や骨を圧迫するように保持され、薬指と小指への血流が減少する可能性があります。 右手は研磨サイクル中ずっと拡大鏡を持ち、XNUMX 本の人差し指に等尺性の圧力をかけます。 ほとんどの場合、右手と左手は平行な動きのパターンに従いますが、「研ぐ手」の動きでは左手が先導し、少し遅れて右手が動き始め、「検査する手」の動きでは順番にが反転します。 右手のタスクには、左手を支えながら拡大鏡を検査する左目に保持するか (肘の屈曲)、またはダイヤモンド ホルダー ヘッドに圧力をかけてよりよく研磨する (肘の伸展) ことが含まれます。 これらの速い動きは、非常に正確な研磨ディスク上への石の配置につながる急速な加速と減速をもたらします。これには、高度な手先の器用さが要求されます。 仕事の動きが自動的に実行されるほとんど埋め込まれた反射神経になるまで習熟するには長い年月がかかることに注意する必要があります。
ダイヤモンドの研磨は、一見単純な作業であり、ある意味ではそうですが、多くのスキルと経験が必要です。 原材料と加工された材料が正確な仕様に従って管理および製造される他のすべての業界とは対照的に、原石のダイヤモンドは均質ではなく、大小を問わず各ダイヤモンド結晶を個別にチェック、分類、処理する必要があります。 必要な手作業のスキルとは別に、研磨者はすべての研磨段階で操作上の決定を下す必要があります。 目視検査の結果、角度空間補正 (XNUMX 次元判断)、加えられる圧力の量と持続時間、砥石の角度位置、研磨ディスク上の接触点などの要因について決定を下す必要があります。 . 多くの重要なポイントを考慮する必要があり、すべて平均 XNUMX 秒です。 改善を設計するときは、この意思決定プロセスを理解することが重要です。
動作分析を使用して研磨ワークステーションのより良い人間工学的設計とエンジニアリング基準を設定できる段階に進む前に、この独自のユーザーマシン システムに含まれるさらに別の側面に注意する必要があります。 この自動化後の時代において、成功し拡大しているダイヤモンド産業の生産部分は、過去数十年間に行われた巨大な技術的進歩の影響をほとんど受けていません。 業界の他のほとんどすべての部門では、生産方法だけでなく製品自体も定義される技術の変化が継続的に行われていますが、ダイヤモンド業界は事実上静的なままです。 この安定性のもっともらしい理由は、製品も市場も何年にもわたって変化していないという事実かもしれません。 ダイヤモンドのデザインと形状は、実際にはほとんど変わっていません。 ビジネスの観点から、製品や方法を変更する理由はありませんでした。 さらに、研磨作業のほとんどは個々の労働者の下請けによって行われるため、市場の変動に応じて労働力を調整し、作業の流れとダイヤモンド原石の供給を調整することは業界にとって問題ではありませんでした。 生産方法が変わらない限り、製品も変わりません。 より高度な技術と自動化の使用がダイヤモンド業界で採用されると、製品は変化し、市場で入手できる形態はより多様になります。 しかし、ダイヤモンドには、他の製品とは一線を画す神秘的な品質があり、単なる大量生産品と見なされるようになると、価値が低下する可能性があります. しかし最近では、市場の圧力と、主に極東での新しい生産センターの到着が、古い確立されたヨーロッパのセンターに挑戦しています. これらにより、業界は新しい方法と生産システム、および人間のオペレーターの役割を検討することを余儀なくされています。
研磨ワークステーションの改善を検討する場合、人的要因、技術的要因、およびビジネス要因という XNUMX つの主な要因によって管理されるユーザーマシン システムの一部として、研磨ワークステーションを検討する必要があります。 人間工学の原則を考慮した新しい設計は、広い意味でのより良い生産セルへの足がかりを提供します。これは、長時間労働における快適さ、より良い品質の製品、より高い生産率を意味します。 XNUMX つの異なる設計アプローチが検討されています。 XNUMX つは、既存のワークステーションの再設計であり、作業者は同じタスクを実行する必要があります。 XNUMX つ目のアプローチは、最適なトータル ステーションとタスクの設計を目指して、偏りのない方法で研磨タスクを調べることです。 全体的な設計は、入力としての現在のワークステーションではなく、将来の研磨作業に基づいて、上記の XNUMX つのシステム要素のニーズを統合および最適化する設計ソリューションを生成する必要があります。
現在、人間のオペレーターは、研磨作業に関連するタスクのほとんどを実行しています。 これらの人間が実行するタスクは、「入力」と実務経験に依存しています。 これは複雑な心理生理学的プロセスであり、試行錯誤の入力に基づいて、部分的にのみ意識的であり、オペレーターは結果を適切に予測して複雑な操作を実行できます。 何千もの同一の動きの定期的な毎日の作業サイクル中に、「充填」は、非常に正確に実行される運動記憶の人間による自動操作に現れます。 これらの自動モーションのそれぞれについて、目や圧力センサーなどの人間のセンサーから受け取ったフィードバックに応じて、小さな修正が行われます。 将来のダイヤモンド研磨ワークステーションでは、これらのタスクは引き続き別の方法で実行されます。 素材自体に関して言えば、ダイヤモンド業界では、他のほとんどの業界とは対照的に、原材料の相対的価値は非常に高いです。 この事実は、研磨後に可能な限り最大の正味の石を得るために、原石の体積 (または石の重量) を最大限に活用することの重要性を説明しています。 この強調は、ダイヤモンド加工のすべての段階で最も重要です。 生産性と効率は、時間だけを参照するのではなく、達成されるサイズと精度によっても測定されます。
研磨行為で行われる「磨く」、「手で検査する」、「検査する」、「磨く手」という 1992 つの反復作業要素は、1 つの主要なタスク カテゴリに分類できます。センシング要素としてのタスクと、意思決定コンテンツ要素としての制御と管理。 Gilad と Messer (XNUMX) は、人間工学に基づいたワークステーションの設計上の考慮事項について説明しています。 図XNUMXは、高度な研磨セルの概要を示しています。 そのような設計の詳細は専門的に制限された「ノウハウ」として守られているため、一般的な構造のみが示されています。 研磨セルという用語が使用されているのは、このユーザーマシン システムには、ダイヤモンドを研磨するためのまったく異なるアプローチが含まれているためです。 人間工学に基づいた改良に加えて、このシステムは、同時に XNUMX ~ XNUMX 個の石を製造できる機械装置と光電子装置で構成されています。 視覚および制御タスクの一部は技術オペレーターに移され、生産セルの管理は、最適な操作行為をサポートするために形状、重量、およびオプションの操作移動に関する瞬間的な情報を提供するディスプレイ ユニットを介して仲介されます。 このような設計により、研磨ワークステーションは数歩進んで近代化され、エキスパート システムと視覚制御システムが組み込まれ、すべてのルーチン作業で人間の目に取って代わります。 オペレーターは、いつでも介入し、データを設定し、マシンのパフォーマンスについて人間の判断を下すことができます。 機械式マニピュレーターとエキスパート システムは、すべての研磨作業を実行できる閉ループ システムを形成します。 マテリアルハンドリング、品質管理、および最終承認は引き続きオペレーターに属します。 高度なシステムのこの段階では、レーザー研磨機などのより高度な技術の採用を検討するのが適切でしょう。 現在、レーザーはダイヤモンドのソーイングとカットに広く使用されています。 技術的に進歩したシステムを使用すると、ヒューマン タスクの記述が根本的に変わります。 熟練した研磨師の必要性は、おそらく監督の下で、より大きく、最高値のダイヤモンドのみを研磨するようになるまで減少します.
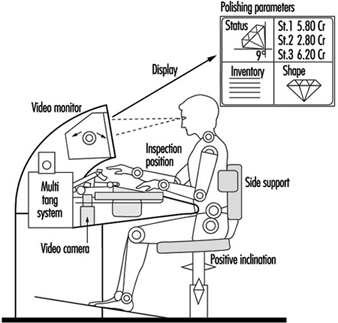
人間工学的設計原則の無視: チェルノブイリ
1986 年のチェルノブイリ事故の原因は、運転要員、発電所の管理者、原子炉の設計、およびソ連の原子力産業における適切な安全情報の欠如にさまざまに起因しています。 この記事では、事故に結びついた多くの設計上の欠陥、運用上の欠点、および人的ミスについて考察します。 事故に至る一連の出来事、原子炉と冷却棒の設計上の問題、および事故自体の過程を調べます。 人間工学の側面を考慮し、事故の主な原因はユーザーとマシンの不適切な相互作用であるという見解を表明しています。 最後に、不備が続いていることを強調し、人間工学の教訓を十分に学ばない限り、同様の災害が依然として発生する可能性があることを強調しています。
チェルノブイリ事故の全貌はまだ明らかにされていません。 率直に言えば、真実は依然として利己的な寡黙、半分の真実、秘密主義、さらには虚偽によって覆い隠されています。 事故の原因を包括的に調査することは、非常に困難な作業のようです。 捜査官が直面する主な問題は、調査に利用できるようになったわずかな情報に基づいて、事故とその事故における人的要因の役割を再構築する必要があることです。 チェルノブイリの事故は重大な技術的事故以上のものであり、災害の原因の一部は行政と官僚機構にもある。 ただし、この記事の主な目的は、チェルノブイリ事故で組み合わされた設計上の欠陥、運用上の欠点、および人的ミスを検討することです。
誰が悪いのか?
1989 年、チェルノブイリ原子力発電所 (NPP) で使用された圧力管型大出力沸騰水型原子炉 (RBMK) の主任設計者は、チェルノブイリ事故の原因についての見解を示しました。 彼は、災害の原因は、職員が正しい手順、つまり「生産規律」を守らなかったことにあると考えています。 彼は、事故を調査している弁護士も同じ結論に達したと指摘した. 彼の見解によれば、「設計や製造の失敗ではなく、担当者に問題がある」とのことです。 RBMK 開発の研究責任者は、この見解を支持しました。 原因としての人間工学的不備の可能性は考慮されていません。
オペレーター自身が異なる意見を表明しました。 第 1,500 部隊の当直監督者である AF アキモフは、事故で短期間に XNUMX ラド (R) を超える放射線を浴びて病院で死亡したとき、両親に自分の行動を伝え続けました。彼は何が間違っていたのか理解できませんでした。 彼の粘り強さは、完全に安全であるはずの原子炉に対する絶対的な信頼を反映していました。 アキモフはまた、乗組員を責める理由は何もないと述べた。 オペレーターは自分たちの行動が規制に準拠していることを確信しており、後者は爆発の可能性についてはまったく言及していませんでした。 (驚くべきことに、原子炉が特定の条件下で危険になる可能性が安全規則に導入されたのは、チェルノブイリ事故の後でした。)しかし、その後明らかになった設計上の問題を考えると、運転員がなぜ棒を炉に挿入するのかを理解できなかったことは重要です。コアは、設計どおりに核反応を即座に停止させる代わりに、そのような恐ろしい爆発を引き起こしました. 言い換えれば、この場合、彼らはメンテナンスの指示と原子炉システムのメンタル モデルに従って正しく行動しましたが、システムの設計はそのモデルに対応していませんでした。
爆発の可能性のある施設の安全規則に違反したという理由で、人的損失を考慮して、プラント管理者のみを代表する XNUMX 人が有罪判決を受けました。 裁判長は、「プラント設計の改善策を怠った者」について、調査を進める旨の発言をした。 彼はまた、部門職員、地方自治体、および医療サービスの責任についても言及しました。 しかし、実際には、事件が終結したことは明らかでした。 原子力技術の歴史における最大の災害の責任を問われたのは、他の誰でもありませんでした。
しかし、原子力発電所の将来の安全な運用のために重要な教訓を学ぶために、災害に組み合わされたすべての原因となる要因を調査する必要があります。
秘密主義: 研究と産業における情報の独占
「チェルノブイリ-86」の原因となったユーザーとマシンの関係の失敗は、ある意味で、ソビエトの原子力施設における技術的コミュニケーションを支配していた秘密主義の政策、つまり情報独占の実施に起因している可能性があります。 科学者と研究者の小さなグループには、原子力の基本原則と手順を定義する完全な権利が与えられました。これは、秘密主義のポリシーによって確実に保護された独占です。 その結果、NPP の絶対的な安全性に関するソビエトの科学者による安心感は 35 年間揺るぎないものであり、秘密主義は民間の原子力指導者の無能さを隠していた。 ちなみに、この秘密がスリーマイル島の事故に関する情報にも及んでいることが最近判明した。 ソ連の原子力発電所の運転要員は、この事故について十分に知らされていませんでした。原子力発電所の安全性に関する公式見解と矛盾しない、選択された情報項目だけが知らされました。 この論文の著者が 1985 年に発表した、スリーマイル島事故の人間工学的側面に関するレポートは、NPP の安全性と信頼性に関係する人々には配布されませんでした。
アルメニアとチェルノブイリ (1982 年) の原子力発電所での事故を除いて、ソビエトの原子力事故はこれまで公にされたことはありませんでした。 プラウダ. 事態の真相を隠すことによって (したがって、事故分析に基づく教訓を利用することができなかった)、原子力産業の指導者たちは、チェルノブイリ 86 への道を真っ直ぐに設定していた。オペレーター活動の単純化された考えが植え付けられ、原子力発電所を運転するリスクは過小評価されていました。
チェルノブイリ事故の影響に関する国家専門家委員会のメンバーは、1990 年に次のように述べています。 どのエラーが私たちの経験不足によるもので、どのエラーが実際に真実を隠蔽するための意図的な試みであったかを判断することが不可欠です。」
1986年のチェルノブイリ事故
テスト計画の誤り
25 年 1986 月 4 日、チェルノブイリ NPP の XNUMX 基目 (チェルノブイリ XNUMX) は、定期保守の準備が行われていました。 計画は、ユニットをシャットダウンし、通常の電源から完全に電力を奪われた、作動しない安全システムを含む実験を行うことでした. このテストは実施されるべきだった 最初のチェルノブイリ 4 起動。 しかし、国家委員会はユニットの立ち上げを急いでいたため、いくつかの「重要でない」テストを無期限に延期することにしました。 受入証明書は 1982 年末に署名されました。したがって、副主任技術者は、完全に非アクティブなユニットを前提とした以前の計画に従って行動していました。 彼のテストの計画とタイミングは、この暗黙の仮定に従って進められました。 このテストは決して彼自身のイニシアチブで実施されたものではありません。
テストのプログラムは、チーフ エンジニアによって承認されました。 テスト中の出力は、タービン ローターのランダウン エネルギー (慣性誘導回転中) から生成されると想定されていました。 回転中のローターは、非常時に使用できる発電を提供します。 原子力発電所で電力が完全に失われると、炉心内の冷却材循環を提供するポンプを含むすべての機構が停止し、炉心メルトダウンという重大な事故につながります。 上記の実験は、他の利用可能な手段 (タービンの慣性回転) を使用して発電する可能性をテストすることを目的としていました。 適切な手順が開発され、追加の安全対策が講じられている場合、稼働中のプラントでそのようなテストを実行することは禁止されていません。 プログラムは、テスト期間全体のバックアップ電源が提供されることを保証する必要があります。 言い換えれば、電力の損失は暗示されるだけで、決して実現されません。 試験は、原子炉が停止した後、つまり、「スクラム」ボタンが押され、吸収棒が炉心に挿入されたときにのみ実行できます。 これに先立って、原子炉は、少なくとも 28 ~ 30 本の吸収棒が炉心に挿入された状態で、操作手順で指定された反応度余裕で安定した制御状態にある必要があります。
チェルノブイリ発電所の主任技術者によって承認されたプログラムは、上記の要件のいずれも満たしていませんでした。 さらに、非常用炉心冷却系(ECCS)の停止を要求したため、試験期間全体(約1986時間)にわたってプラントの安全が脅かされました。 プログラムを開発する際、イニシエーターは ECCS をトリガーする可能性を考慮に入れました。 タービンが蒸気を必要としなくなったため、ブリードオフ方法はプログラムで指定されませんでした。 明らかに、関係者は原子炉物理学について完全に無知でした。 原子力発電の指導者たちには、明らかに同様に資格のない人々も含まれており、これは、上記の計画が XNUMX 年 XNUMX 月に責任ある当局に承認のために提出されたとき、彼らからまったくコメントされなかったという事実を説明するものです。 鈍い危機感も一因でした。 原子力技術を取り巻く秘密主義の政策により、原子力発電所は安全で信頼性が高く、その運転には事故がなかったという意見が形成されました。 しかし、このプログラムに対する公式の反応がなかったことは、チェルノブイリ原発の所長に危険の可能性を警告するものではありませんでした。 彼は、許可されていないにもかかわらず、認定されていないプログラムを使用してテストを続行することにしました。
テストプログラムの変更
テストを実行している間、担当者はプログラム自体に違反したため、事故の可能性がさらに高まりました。 チェルノブイリの人員は、1982 つの重大な誤りと違反を犯しました。 プログラムによると、ECCS は機能しなくなりました。これは、最も重大かつ致命的なエラーの XNUMX つです。 給水調節弁はあらかじめ切り離されてロックされていたため、手動で開くことさえできませんでした。 高温のコアに冷水が入ることによる熱衝撃を防ぐために、緊急冷却は意図的に停止されました。 この決定は、原子炉が持ちこたえるという確固たる信念に基づいていました。 原子炉への「信頼」は、比較的トラブルのない XNUMX 年間のプラント運転によって強化されました。 XNUMX 年 XNUMX 月に起きたチェルノブイリ原発の炉心部分メルトダウンという深刻な警告さえも無視されました。
テスト プログラムによると、ローターのランダウンは 700 ~ 1000 MW の出力レベルで実行されることになっていました。th (メガワットの火力)。 原子炉が停止していたので、そのようなランダウンが実行されるべきでしたが、別の悲惨な方法が選択されました: 原子炉がまだ稼働している状態でテストを続行することです。 これは、実験の「純度」を確保するために行われました。
特定の動作条件では、吸収ロッドのクラスターのローカル コントロールを変更またはオフにする必要があります。 これらのローカル システムの 30 つをオフにするとき (これを行う方法は、低出力操作の手順で指定されています)、上級原子炉制御エンジニアは、制御システムの不均衡を修正するのに時間がかかりました。 その結果、電力は XNUMX MW を下回りました。th 核分裂生成物原子炉中毒(キセノンとヨウ素による)につながった。 このような場合、テストを中断して中毒が治るまで 200 日待たずに正常な状態に戻すことはほぼ不可能です。 運用担当の副主任技術者は試験を中断したくなかったので、大声で制御室のオペレータに電力レベル(XNUMX MW で安定していた)を上げ始めるように強制しました。th)。 原子炉の被毒は続いたが、大出力の圧力管型原子炉 (RBMK) では 30 本の燃料棒しか使用できないため、これ以上の出力増加は許されなかった。 原子炉は、被毒を克服しようとして、反応度の安全マージンを維持するために必要な数本のロッドを引き抜いたため、実際には制御不能になり、爆発する可能性があり、スクラムシステムが無効になりました。 それにもかかわらず、テストを続行することが決定されました。 オペレーターの行動は、主にできるだけ早くテストを完了したいという願望によって動機付けられたようです。
反応器と吸収棒の不適切な設計による問題
事故の原因をよりよく理解するために、制御およびスクラムシステムの吸収棒の主な設計上の欠陥を指摘する必要があります。 コアの高さは 7 m で、ロッドの吸収長は 5 m で、その上下に 1 m の中空部分があります。 完全に挿入されたときにコアの下に入る吸収ロッドの下端は、グラファイトで満たされています。 このような設計では、制御棒が炉心に入り、続いて XNUMX メートルの中空部分が続き、最後に吸収部分が続きます。
チェルノブイリ 4 では、合計 211 本の吸収棒があり、そのうち 205 本が完全に引き出されました。 非常に多くのロッドを同時に再挿入すると、最初にグラファイトが終了し、中空部分がコアに入るため、最初は反応度のオーバーシュート (核分裂活動のピーク) が発生します。 安定した制御原子炉では、このようなバーストは心配する必要はありませんが、悪条件が組み合わさった場合、そのような追加は中性子原子炉の暴走を引き起こすため、致命的となる可能性があります。 初期の反応度増加の直接の原因は、炉心での水の沸騰の開始でした。 この初期の反応度の増加は、炉心設計に起因する正の蒸気ボイド係数という XNUMX つの特定の欠点を反映していました。 この設計上の欠陥は、オペレーターのエラーを引き起こす障害の XNUMX つです。
原子炉と吸収棒の重大な設計上の欠陥が、実際にチェルノブイリ事故を予見しました。 1975 年、レニングラード工場での事故の後、専門家は炉心設計の欠陥を考慮して、別の事故の可能性について警告しました。 チェルノブイリ事故の XNUMX か月前、クルスク発電所の安全検査官がモスクワに手紙を送り、主任研究者兼主任設計者に、原子炉と制御および保護システム ロッドの設計上の不備を指摘した。 しかし、国家原子力監督委員会は、彼の主張は根拠がないと述べた。
事故自体の経過
イベントの経過は次のとおりです。 原子炉冷却材ポンプのキャビテーションの開始により、炉心内の流量が減少し、圧力管内で冷却材が沸騰しました。 ちょうどその時、当直長がスクラムシステムのボタンを押した。 これにより、引き抜かれた制御棒とスクラム棒がすべて炉心に落下した。 しかし、最初にコアに入ったのはグラファイトとロッドの中空端であり、反応度の成長を引き起こしました。 そして、それらは集中的な蒸気生成の開始時にコアに入りました。 コア温度の上昇も同様の効果をもたらしました。 このように、コアにとって好ましくない XNUMX つの条件が組み合わされていました。 即座に原子炉の暴走が始まりました。 これは主に RBMK の全体的な設計上の欠陥によるものでした。 ここで、ECCS が機能しなくなり、施錠され、封印されていたことを思い出してください。
その後の出来事はよく知られています。 原子炉が損傷した。 燃料、グラファイト、およびその他の炉内コンポーネントの大部分が吹き飛ばされました。 損傷したユニットの近くの放射線レベルは 1,000 から 15,000 R/h に達しましたが、放射線レベルがかなり低い離れた場所や保護された場所がいくつかありました。
最初、職員は何が起こったのか理解できず、「ありえない!」と言い続けました。 すべてが適切に行われました。」
事故に関するソ連の報告に関連した人間工学的考察
1986 年夏の国際原子力協会 (IAEA) の会議でソ連の代表団が提出した報告書は、チェルノブイリの爆発に関する真実の情報を明らかに提供していたが、強調が適切な場所に置かれたかどうか、および設計が適切であったかどうかについては疑問が返ってきた。不備はあまり優しく扱われませんでした。 報告によると、職員の行動はできるだけ早くテストを完了したいという願望によって引き起こされました。 要員が試験の準備と実施の手順に違反し、試験プログラム自体に違反し、原子炉制御を行う際に不注意であったという事実から判断すると、運転員は原子炉内で行われているプロセスを十分に認識していなかったようです。そして危機感を完全に失った。 レポートによると:
原子炉の設計者は、設計された安全手段の意図的な停止と操作手順の違反が組み合わさった場合に事故を防ぐように設計された安全システムを提供することができませんでした。 したがって、事故の最初の原因は、プラントの人員による操作手順と条件の違反である可能性は非常に低いものでした。
報告書の最初のテキストでは、「プラントの人員」という言葉の後に「原子炉と制御および保護システムのロッドの設計上の欠陥を示した」というフレーズが続いていたことが判明しました。
設計者は、プラント制御に「賢い愚か者」が干渉する可能性は低いと考えたため、対応する設計された安全メカニズムを開発できませんでした。 設計者が実際の事象の組み合わせはありそうもないと考えたという報告書のフレーズを考えると、いくつかの疑問が生じます。 答えが肯定的である場合、それらはプラント設計でどのように考慮されましたか? 残念ながら、最初の質問に対する答えは否定的であり、ユーザーとマシンの相互作用の領域は未定のままです。 その結果、現場での緊急訓練と理論的および実践的な訓練は、主に基本的な制御アルゴリズム内で行われました。
原子力発電所のコンピュータ支援制御システムと制御室を設計するとき、人間工学は使用されませんでした。 特に重大な例として、炉心状態を示す重要なパラメータ、つまり炉心内の制御および保護システム棒の数が、認識および理解に不適切な方法でチェルノブイリ 4 の制御盤に表示されました。 この不十分さは、ディスプレイを解釈するオペレータの経験によってのみ克服されました。
プロジェクトの誤算と人的要因の無視により、遅延型爆弾が作成されました。 コアと制御システムの設計上の欠陥が、オペレーターによるさらなる誤動作の致命的な原因となったことを強調する必要があります。したがって、事故の主な原因は、ユーザーとマシンの相互作用の不適切な設計でした。 災害の調査官は、「チェルノブイリが私たちに教えてくれた教訓である、人間工学と人間と機械の相互作用への敬意」を求めました。 残念ながら、古いアプローチや固定観念を捨て去ることは困難です。
1976 年の早い時期に、アカデミックな PL Kapitza は、チェルノブイリの防止に関連する可能性のある理由から災害を予見していたようですが、彼の懸念が明らかになったのは 1989 年のことでした。1976 年 XNUMX 月、 米国のニュースと世界のレポート週刊ニュース誌は、カリフォルニア州のブラウンズ・フェリー原子力施設での火災に関するレポートを掲載しました。 カピッツァはこの事故を非常に懸念していたので、1976 年 XNUMX 月にストックホルムで発表された彼自身の報告書「地球規模の問題とエネルギー」で言及したほどです。カピッツァは特に次のように述べています。
この事故は、そのような事象の確率を計算するために使用される数学的方法の不十分さを浮き彫りにしました。これらの方法は、人的エラーによる確率を考慮していないからです。 この問題を解決するためには、原発事故を未然に防ぐための対策が必要です。
カピッツァは自分の論文を雑誌に掲載しようとした ナウカ・イ・ジズン (Science and Life) でしたが、「大衆を怖がらせる」ことは望ましくないという理由で論文は却下されました。 スウェーデンの雑誌 アンビオ 彼は Kapitza に論文を依頼しましたが、長期的にはそれも出版しませんでした。
科学アカデミーは、ソ連ではそのような事故はあり得ないことをカピツァに保証し、最終的な「証拠」として、出版されたばかりの原子力発電所の安全規則を彼に与えました。 これらのルールには、たとえば「8.1. 原子力事故の場合の人員の行動は、事故の影響に対処するための手順によって決定されます。」
チェルノブイリ後
チェルノブイリ事故の直接的または間接的な結果として、現在の原子力発電所の安全な運転を確保し、将来の原子力発電所の設計と建設を改善するための対策が開発され、実施されています。 特に、スクラムシステムの動作をより速くし、職員が故意に停止する可能性を排除するための措置が講じられました。 吸収棒のデザインが変更され、より多くのものが作られました。
さらに、異常状態に対するチェルノブイリ前の手順では、原子炉を運転し続けるようオペレータに指示していましたが、現在の手順では、原子炉を停止する必要があります。 基本的に言えば、実際には本質的に安全な新しい原子炉が開発されています。 確率論的安全分析や実験的安全ベンチ試験など、チェルノブイリ以前は無視されていたか存在しなかった新しい研究分野が出現しました。
しかし、元ソ連原子力産業大臣 V. Konovalov によると、原子力発電所の故障、停止、事故の数は依然として多い。 調査によると、これは主に、納入されたコンポーネントの品質の低さ、人的ミス、および設計およびエンジニアリング機関による不十分なソリューションによるものです。 建設と設置作業の品質も同様に望まれるものです。
さまざまな修正や設計変更が一般的になっています。 その結果、不十分なトレーニングと相まって、操作担当者の資格は低くなります。 職員は、プラント運転の経験に基づいて、仕事の過程で知識とスキルを向上させる必要があります。
人間工学の教訓はまだ学ぶべきです
最も効果的で洗練された安全制御システムでさえ、人的要因が考慮されていなければ、プラントの信頼性を提供することはできません。 原子力発電所の全連合科学研究所の職員の職業訓練のための作業が準備されており、この努力を大幅に拡大する計画があります。 ただし、ヒューマン エンジニアリングは、プラントの設計、建設、試験、および運用の不可欠な部分ではないことを認めておく必要があります。
旧ソ連原子力省は 1988 年に、1990 年から 2000 年にかけて、原子力発電所や企業からの人間工学の専門家に対する要求がなかったため、中等教育以上の教育を受けた人間工学の専門家は不要であるとの公式の調査に回答した。
この記事で言及されている問題の多くを解決するには、物理学者、設計者、産業技術者、操作担当者、人間工学、心理学、その他の分野の専門家が関与する共同研究開発を実施する必要があります。 このような共同作業の組織化には大きな困難が伴います。特に困難な点の XNUMX つは、原子力分野の「真実」に関する一部の科学者および科学者グループの独占が残っていることと、原子力発電所の運転に関する情報を運転担当者が独占していることです。 利用可能な包括的な情報がなければ、原子力発電所の人間工学的診断を行うことは不可能であり、必要に応じて、その欠点を排除する方法を提案し、事故を防止するための対策システムを開発することは不可能です。
旧ソビエト連邦の原子力発電所では、現在の診断、制御、コンピューター化の手段は、認められた国際基準からかけ離れています。 植物の制御方法は不必要に複雑で混乱を招きます。 人材育成の高度なプログラムはありません。 設計者によるプラント操作のサポートが不十分であり、操作マニュアルのフォーマットが非常に時代遅れです。
結論
1990 年 XNUMX 月、さらなる調査の後、XNUMX 人の元チェルノブイリ職員が任期満了前に刑務所から釈放されました。 しばらくして、投獄されていたすべての運用担当者が、指定された時間前に解放されました。 NPP の信頼性と安全性に携わる多くの人々は、たとえその正しい行動が爆発を引き起こしたとしても、今では人員が正しく行動したと信じています。 チェルノブイリの人員は、事故の予想外の規模に対して責任を負うことはできません。
災害の責任者を特定する試みにおいて、裁判所は主に、この場合、チェルノブイリ原子力発電所の設計者であった技術専門家の意見に依存しました。 このチェルノブイリ事故の結果として、もう XNUMX つの重要な教訓が学ばれます。NPP のような複雑な施設での災害に対する責任を特定するために使用される主要な法的文書が、これらの施設の設計者のみによって作成および変更された保守手順書のようなものである限り、災害の本当の理由を見つけたり、それらを回避するために必要なすべての予防措置を講じたりすることは、技術的に難しすぎます。
さらに、運用担当者は、災害時に保守手順を厳密に実行する必要があるのか、それとも、指示と矛盾したり、無意識のうちに災害の脅威に関連付けられたりする可能性がある知識、経験、または直感に従って行動する必要があるのか 、という疑問が残ります。厳罰。
残念なことに、「チェルノブイリ事故の責任は誰にあるのか?」という質問は、 清算されていません。 責任者は、開発エンジニアだけでなく、政治家、物理学者、管理者、オペレーターの中から探す必要があります。 チェルノブイリ事件のように単なる「スイッチマン」に有罪判決を下したり、1991 年にスモレンスクで事件に悩まされたユニットで行われたように、聖職者に NPP を聖水で聖化させたりすることは、NPP の安全で信頼できる運用を確保するための正しい手段ではありません。
チェルノブイリ事故は、二度と起こらないような不運な出来事にすぎないと考えている人は、人間の基本的な特徴の XNUMX つは、運転員だけでなく科学者やエンジニアも間違いを犯すということを認識しなければなりません。 技術的または産業的な分野でユーザーとマシンの相互作用に関する人間工学の原則を無視すると、より頻繁で深刻なエラーが発生します。
したがって、原子力発電所などの技術的設備は、重大な事故が発生する前にエラーの可能性を発見できるように設計する必要があります。 多くの人間工学的原則は、例えばインジケーターやコントロールの設計において、そもそもエラーを防止しようとして導き出されてきました。 しかし、今日でも世界中の多くの技術施設でこれらの原則が守られていません。
複雑な施設の運用担当者は、通常の運用だけでなく、通常の状態から逸脱した場合に必要な手順についても、高度な資格を持っている必要があります。 関連する物理学と技術を正しく理解することは、要員が危機的な状況下でより適切に対応するのに役立ちます。 このような資格は、集中的なトレーニングによってのみ取得できます。
あらゆる種類の技術的アプリケーションにおけるユーザーとマシンのインターフェースの絶え間ない改善は、多くの場合、軽微または重大な事故の結果として、ヒューマン エラーの問題、つまりユーザーとマシンの相互作用の問題が解決されていないことを示しています。 特に原子力などの非常に破壊力のある技術では、ユーザーとマシンの相互作用の信頼性を高めることを目的とした継続的な人間工学的研究と、得られた結果の結果としての適用が必要です。 チェルノブイリ事故は、科学者や技術者、管理者や政治家が、複雑な技術施設の設計と運用の過程で人間工学を取り入れる必要性を無視した場合に起こりうる重大な警告です。
IAEA 事務局長の Hans Blix は、この問題を重要な比較で強調しています。 戦争の問題は将軍だけに任せるには深刻すぎると言われてきました。 ブリックス氏は、「原子力の問題は、原子力の専門家だけに任せるには深刻すぎる」と付け加えた。
免責事項: ILO は、この Web ポータルに掲載されているコンテンツが英語以外の言語で提示されていることについて責任を負いません。英語は、オリジナル コンテンツの最初の制作およびピア レビューに使用される言語です。その後、特定の統計が更新されていません。百科事典の第 4 版 (1998 年) の作成。