マイクロエレクトロニクスとセンサー技術の一般的な発展は、信頼性が高く、耐久性があり、保守が少なく、安価な存在および接近検出器を利用できるようにすることで、労働安全の改善が達成できることを期待する理由を与えています. この記事では、センサー技術、さまざまな検出手順、センサー システムの使用に適用される条件と制限、およびドイツで完了した研究と標準化作業について説明します。
存在検出器の基準
存在検出器の開発と実際の試験は、労働安全の改善と人員全般の保護における技術的取り組みに対する将来の最大の課題の XNUMX つです。 存在検出器 確実かつ確実に信号を送信するセンサーです。 人の存在または接近の近く。 さらに、この警告は、予測される接触が発生する前に、回避行動、ブレーキ、または停止中の機械の停止が行われるように、迅速に発生する必要があります。 人が大きいか小さいかに関係なく、姿勢や服装がセンサーの信頼性に影響を与えることはありません。 さらに、建設現場やモバイル アプリケーションなどの最も要求の厳しい条件下で最小限のメンテナンスで使用できるように、センサは確実に機能し、頑丈で安価でなければなりません。 センサーは、メンテナンスフリーで常に準備が整っているという点で、エアバッグのようなものでなければなりません。 一部のユーザーは、必須ではない機器と見なすものを維持することをためらうため、センサーは何年も保守されないままになる可能性があります。 存在検出器のもう XNUMX つの特徴は、要求される可能性がはるかに高いものですが、人間以外の障害物も検出し、防御措置を講じるのに間に合うようにオペレーターに警告することです。これにより、修理や物的損害のコストが削減されます。 これが、過小評価されるべきではない存在検出器をインストールする理由です。
検出器アプリケーション
労働安全の分野で存在検出器が予防手段としてより受け入れられるようになれば、避けられない個々の運命的な行為のように見える無数の致命的な事故や重傷を回避または最小限に抑えることができます。 新聞はこれらの事故を非常に頻繁に報じています。ここでは人が後方に移動するローダーにぶつかり、オペレーターはパワーショベルの前輪にひかれた人を見ませんでした。 道路や会社の敷地内、建設現場でのトラックの逆走は、多くの人身事故の原因となっています。 今日の完全に合理化された企業は、トラックをバックアップしているドライバーのガイドとして行動するコ・ドライバーや他の人をもはや提供していません。 これらの移動事故の例は、フォーク リフト トラックなどの他の移動機器に簡単に拡張できます。 ただし、セミモバイルおよび純粋に固定された機器が関与する事故を防ぐために、センサーの使用が緊急に必要です。 例としては、安全担当者によって、安価なセンサーを使用して改善できる可能性のある潜在的に危険な領域として識別された、大型の積載機械の後部領域があります。 存在検出器の多くのバリエーションを革新的に他の車両や大型モバイル機器に適用して、この記事で説明したタイプの事故から保護することができます。これらのタイプの事故は、一般に、致命的ではないにしても、大規模な損傷や重傷を引き起こします。
革新的なソリューションがより普及する傾向は、存在検出器が他のアプリケーションの標準的な安全技術になることを約束するように思われます。 ただし、これはどこにも当てはまりません。 事故と重大な物的損害に動機付けられたこの突破口は、配送用バンや大型トラックの背後での監視、および「新技術」の最も革新的な分野である未来のモバイル ロボット マシンの監視において期待されています。
プレゼンス検出器の適用分野のバリエーションとタスクの多様性 (たとえば、検出フィールドに属し、信号をトリガーしてはならないオブジェクト (特定の条件下では移動オブジェクトでさえ) を許容するなど) には、次のようなセンサーが必要です。インテリジェントな」評価技術がセンサー機能のメカニズムをサポートします。 将来の開発課題であるこの技術は、人工知能の分野を利用した方法から精緻化することができます (Schreiber and Kuhn 1995)。 今日まで、限られた普遍性により、センサーの現在の使用は厳しく制限されてきました。 光のカーテンがあります。 ライトバー; コンタクトマット; パッシブ赤外線センサー; ドップラー効果を使用する超音波およびレーダーの動き検出器。 超音波、レーダー、光インパルスの経過時間測定を行うセンサー。 そしてレーザースキャナー。 モニターに接続された通常のテレビ カメラは、プレゼンス ディテクターではないため、このリストには含まれません。 ただし、人の存在を感知して自動的に作動するカメラは含まれます。
センサー技術
現在、主なセンサーの問題は、(1) 物理的効果 (赤外線、光、超音波、レーダーなど) の使用の最適化と (2) 自己監視です。 レーザ スキャナは、移動ロボットのナビゲーション機器として使用するために集中的に開発されています。 このためには、原理的に部分的に異なる 1993 つのタスクを解決する必要があります。ロボットのナビゲーションと、そこにいる人 (および材料または機器) が衝突されたり、轢かれたり、つかまれたりしないように保護することです (Freund, Dierks and Rossman XNUMX )。 将来の移動ロボットは、今日の固定型産業用ロボットに厳密に適用されている「ロボットと人の空間分離」という同じ安全哲学を維持することはできません。 これは、使用する存在検出器の信頼できる機能に高いプレミアムを置くことを意味します。
「新技術」の使用は、受け入れの問題に関連していることが多く、工場、公共交通エリア、さらには家庭やレクリエーションエリアでさえ、移動してつかむことができるモバイルロボットの一般的な使用が想定されます。 、非常に高度に開発された洗練された信頼性の高い存在検出器が装備されている場合にのみ受け入れられます。 起こりうる受け入れの問題を悪化させることを避けるために、壮大な事故は何としてでも避けなければなりません。 このタイプの職業用保護センサーの開発のための現在の支出レベルは、このことを考慮に入れるには及ばない。 多くのコストを節約するために、存在検出器は、後でではなく、移動ロボットおよびナビゲーション システムと同時に開発およびテストする必要があります。
自動車に関しては、安全性の問題がますます重要になってきています。 自動車の乗客の革新的な安全性には、XNUMX 点式シートベルト、チャイルド シート、エアバッグ、一連の衝突試験で検証されたアンチロック ブレーキ システムが含まれます。 これらの安全対策は、生産コストの比較的増加する部分を表しています。 前方の車との距離を測定するためのサイド エアバッグとレーダー センサー システムは、乗員保護における革新的な開発です。
外部の自動車の安全性、つまり第三者の保護に対する注目が高まっています。 最近では、オートバイ、自転車、歩行者が後輪の下に落ちる危険を防ぐために、主にトラックにサイドプロテクションが必要になっています。 次の論理的なステップは、大型車両の背後を存在検出器で監視し、後方警告装置を設置することです。 これには、労働安全目的のための最大性能、自己監視、メンテナンスフリーで確実に機能する安価なセンサーの開発、テスト、および利用可能にするために必要な資金を提供するというプラスの副作用があります。 センサーまたはセンサー システムの広範な実装に伴う試行プロセスは、パワー ショベル、ヘビー ローダー、および動作中に半分の時間をバックアップするその他の大型モバイル マシンなど、他の分野でのイノベーションを大幅に促進します。 固定ロボットから移動ロボットへの進化プロセスは、存在検出器の開発の追加パスです。 たとえば、移動ロボットの資材運搬車や「無人工場フロア トラクター」で現在使用されているセンサーを改善することができます。これらのトラクターは、固定された経路をたどるため、安全要件が比較的低くなります。 存在検出器の使用は、物資および旅客輸送の分野における安全性を向上させるための次の論理的なステップです。
検出手順
上述のタスクを評価し、解決するために、電子測定および自己監視方法、およびある程度の高性能コンピューティング手順に関連して利用可能なさまざまな物理的原理を使用することができます。 SF映画で非常に一般的な自動化されたマシン(ロボット)の一見楽で確実な操作は、現実の世界では、イメージング技術と高性能パターン認識アルゴリズムをそれらに類似した距離測定方法と組み合わせて使用 することで達成される可能性があります。レーザースキャナーで採用。 人にとっては簡単に見えることはすべて自動機械にとっては難しいという逆説的な状況を認識しなければなりません。 たとえば、優れたチェスのプレー (前脳の活動を必要とする) などの困難なタスクは、直立歩行や手と目、およびその他の運動の調整 (によって媒介される) の実行などの単純なタスクよりも、自動化されたマシンによってより簡単にシミュレートおよび実行できます。中脳と後脳)。 これらの原理、センサー アプリケーションに適用可能な方法、および手順のいくつかを以下に説明します。 これらに加えて、さまざまなタイプの物理的効果の組み合わせで部分的に機能する、非常に特別なタスクのための特別な手順が多数あります。
遮光カーテンとバー。 最初の存在検出器の中には、光バリア カーテンとバーがありました。 それらはフラットな監視ジオメトリを持っています。 つまり、バリアを通過した人は検出されなくなります。 これらのデバイスを使用すると、たとえば、オペレータの手、またはオペレータの手に保持されているツールまたは部品の存在を迅速かつ確実に検出できます。 これらは、手作業で材料を投入する必要がある機械 (プレス機やパンチング マシンなど) の労働安全に大きく貢献します。 XNUMX 分間に XNUMX ~ XNUMX 回しか手が届かない場合でも、わずか数年で約 XNUMX 万回の操作が行われるため、信頼性は統計的に非常に高くなければなりません。 送信側コンポーネントと受信側コンポーネントの相互自己監視は、他のすべてのプレゼンス検出手順の標準となる非常に高い技術レベルまで開発されています。
コンタクトマット(スイッチマット). パッシブとアクティブ (ポンプ) の両方のタイプの電気および空気圧接触マットとフロアがあり、最初はサービス機能 (ドア オープナー) で多数使用されていましたが、モーション ディテクターに置き換えられました。 さらなる開発は、あらゆる種類の危険ゾーンで存在検出器を使用することで進化します。 たとえば、機械の操作からその機能の厳密な監視へと労働者の機能が変化した自動製造の開発は、適切な検出器に対する対応する需要を生み出しました。 この使用の標準化は十分に進んでおり (DIN 1995a)、特別な制限 (レイアウト、サイズ、最大許容「デッド」ゾーン) により、この使用領域での設置には専門知識の開発が必要でした。
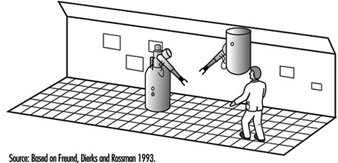
コンピュータ制御の複数のロボットシステムと組み合わせることで、コンタクトマットの興味深い用途が生まれます。 オペレーターは、存在検出器が正確な位置を取得し、衝突回避システムが組み込まれたロボット制御システムを管理するコンピューターに通知するように、1993 つまたは 1 つの要素を切り替えます。 ドイツ連邦安全研究所 (BAU) によって進められた XNUMX つのテストでは、この目的のために、ロボット アームの作業領域の下に、小さな電気スイッチ マットで構成される接触マット フロアが構築されました (Freund、Dirks、および Rossman XNUMX)。 この存在検出器は、チェス盤の形をしていました。 それぞれ有効化されたマット フィールドはコンピューターにオペレーターの位置を伝え (図 XNUMX)、オペレーターがロボットに近づきすぎるとロボットは離れていきました。 存在検出器がなければ、ロボット システムはオペレータの位置を確認できず、オペレータを保護することはできません。
図 1. 計算されたラッパー ボディ内の人 (右) と XNUMX 台のロボット
リフレクター (モーション センサーと存在検出器)。 これまでに議論されたセンサーがどれだけ価値があるとしても、それらは広い意味での存在検出器ではありません。 主に労働安全上の理由から、大型車両および大型モバイル機器に対するそれらの適合性は、1 つの重要な特性を前提としています: (2) XNUMX つの位置からエリアを監視する能力、および (XNUMX) 追加の対策を必要とせずにエラーのない機能。たとえば、リフレクター デバイスの使用。 監視エリアに人が入り、その人がいなくなるまで立ち止まっていることを検出することは、完全に静止している人を検出する必要があることも意味します。 これは、少なくともモバイル機器に関連して、いわゆるモーションセンサーを存在検出器と区別します。 モーション センサーは、ほとんどの場合、車両が動き出したときにトリガーされます。
モーションセンサー。 モーション センサーの 1 つの基本的なタイプは次のとおりです。 (10) 「パッシブ赤外線センサー」 (PIRS)。監視領域の赤外線ビームの最小の変化に反応します (検出可能な最小ビームは約 XNUMX です)。-9 約 7 ~ 20 μm の波長範囲の W); (2) ドップラー原理を使用した超音波およびマイクロ波センサー。周波数の変化に応じて物体の動きの特性を決定します。 たとえば、ドップラー効果は、機関車が接近しているときにオブザーバーに対して機関車のホーンの周波数を増加させ、機関車が遠ざかっているときに周波数を減少させます。 ドップラー効果により、受信機はドップラー周波数の出現について隣接する周波数帯域の信号周波数を監視するだけでよいため、比較的単純なアプローチセンサーの構築が可能になります。
1970 年代半ばに、モーション ディテクターの使用は、ドア オープナー、盗難防止、物体保護などのサービス機能アプリケーションで普及するようになりました。 定置使用の場合、危険な場所に向かって人が近づいていることを検出すると、適時に警告を発したり、機械の電源を切ったりするのに十分でした。 これは、特に PIRS を使用して、労働安全に使用するための動作検出器の適合性を研究するための基礎でした (Mester et al. 1980)。 服を着ている人は一般に周囲よりも温度が高いため (頭 34°C、手 31°C)、無生物よりも近づいている人を検出する方がやや簡単です。 限られた範囲で、機械部品は、検出器をトリガーせずに監視エリア内を動き回ることができます。
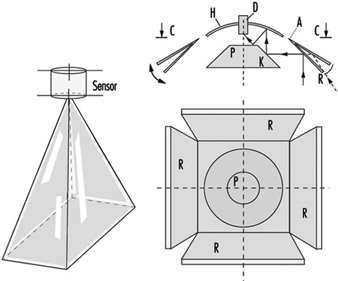
パッシブ方式 (送信機なし) には、長所と短所があります。 PIRS の利点は、ノイズや電気スモッグの問題が発生しないことです。 盗難防止と物体保護のためには、探知器を簡単に見つけられないことが特に重要です。 しかし、純粋に受信機であるセンサーは、労働安全に不可欠な自身の有効性を監視することはほとんどできません。 この欠点を克服するための 5 つの方法は、監視対象エリアに設置され、センサーをトリガーしない小さな変調 (20 ~ 2 Hz) 赤外線エミッターをテストすることでしたが、そのビームは、変調周波数に設定された固定電子増幅で登録されました。 この変更により、「パッシブ」センサーから「アクティブ」センサーに変わりました。 このようにして、監視領域の幾何学的精度をチェックすることもできました。 鏡には死角があり、パッシブ センサーの方向は、植物の大まかな活動によってずれることがあります。 図 XNUMX は、ピラミッド マントルの形で監視されたジオメトリを持つ PIRS を使用したテスト レイアウトを示しています。 到達範囲が広いため、パッシブ赤外線センサーは、棚保管エリアの通路などに設置されています。
図 2. 危険エリアでの接近検知器としてのパッシブ赤外線センサー
全体として、動作検出器は労働安全に適していないことがテストで示されました。 美術館の夜間フロアは、職場の危険ゾーンとは比較になりません。
超音波、レーダー、光インパルス検出器。 パルス/エコー原理を使用するセンサー、つまり、超音波、レーダー、または光インパルスの経過時間測定は、存在検出器として大きな可能性を秘めています。 レーザー スキャナーを使用すると、光インパルスは、たとえば水平方向にすばやく連続して (通常は回転方式で) 掃引できます。また、コンピューターの助けを借りて、光を反射する平面上のオブジェクトの距離プロファイルを取得できます。 たとえば、2 本の線だけでなく、高さ XNUMX メートルまでの領域で移動ロボットの前にあるもの全体が必要な場合、周囲の領域を表すために大量のデータを処理する必要があります。 将来の「理想的な」プレゼンス検出器は、次の XNUMX つのプロセスの組み合わせで構成されます。
- カメラとコンピューターからなるパターン認識プロセスが採用されます。 後者は「ニューロネット」にもなります。
- 距離を測定するには、さらにレーザー スキャン プロセスが必要です。 これは、速度と方向によって距離と動きを取得するために確立された、パターン認識プロセスによって選択された多数の個々のポイントから、XNUMX 次元空間での関係を取得します。
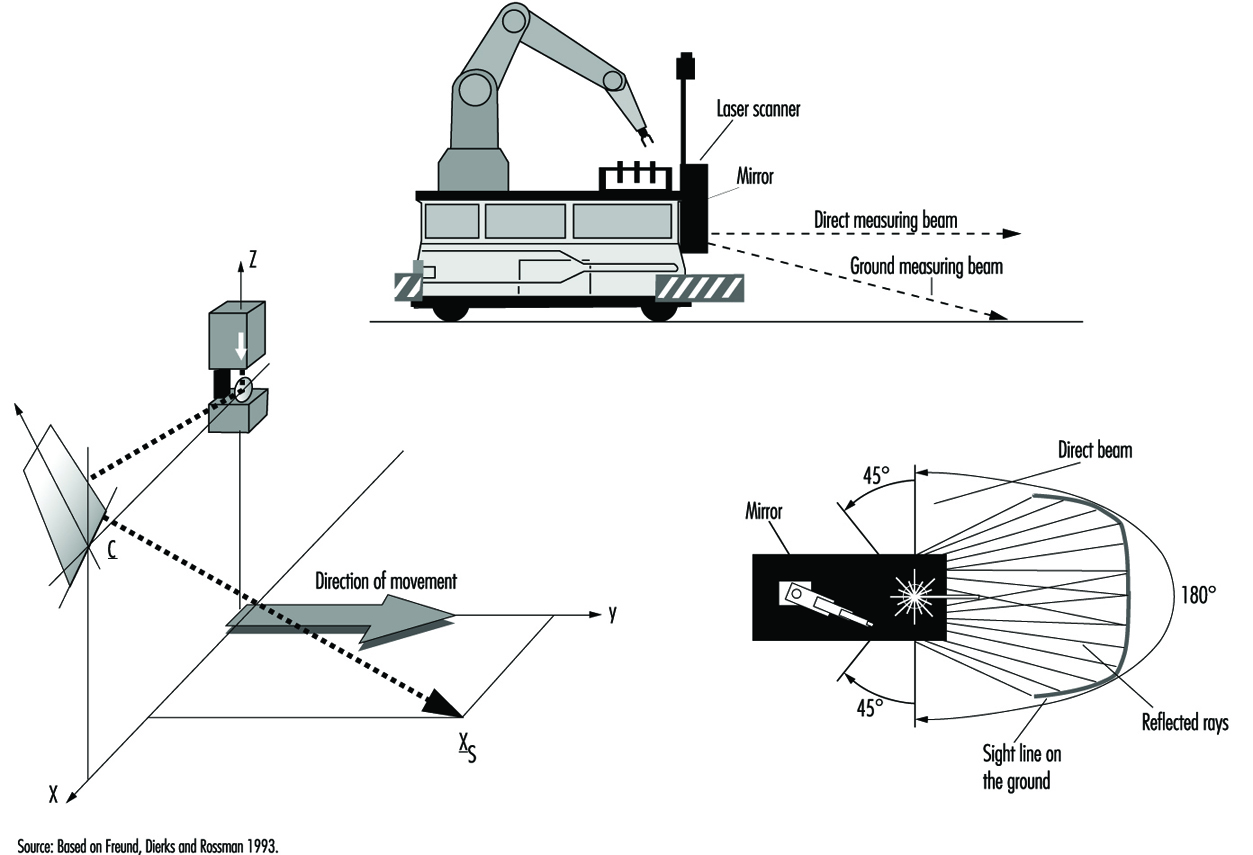
図 3 は、以前に引用した BAU プロジェクト (Freund、Dierks、Rossman 1993) から、移動ロボットでのレーザー スキャナーの使用を示しています。移動ロボットは、ナビゲーション タスク (方向検知ビームを介して) と、すぐ近くにあるオブジェクトの衝突保護も引き受けます。 (存在検出のための地上測定ビームを介して)。 これらの機能を考えると、移動ロボットには次の機能があります。 アクティブ自動フリードライビング (つまり、障害物を回避する能力)。 技術的には、これは、前方への 45° の角度に加えて、スキャナの両側 (ロボットの左舷および右舷) の後方への 180° の角度を利用することによって実現されます。 これらのビームは、移動ロボットの前の床でライト カーテンとして機能する特別なミラーに接続されています (地上のビジョン ラインを提供します)。 そこからレーザーの反射が来ると、ロボットは停止します。 労働安全用途として認定されたレーザーおよび光スキャナーが市場に出回っていますが、これらの存在検出器はさらなる開発の大きな可能性を秘めています。
図 3. ナビゲーションおよび存在検出用のレーザー スキャナーを搭載したモバイル ロボット
信号から応答までの経過時間を使用して距離を決定する超音波およびレーダー センサーは、技術的な観点から要求が少ないため、より安価に製造できます。 センサー領域はクラブの形をしており、左右対称に配置された 330 つまたは複数の小さなサイド クラブがあります。 信号の拡散速度 (音: 300,000 m/s、電磁波: XNUMX km/s) によって、使用される電子機器の必要な速度が決まります。
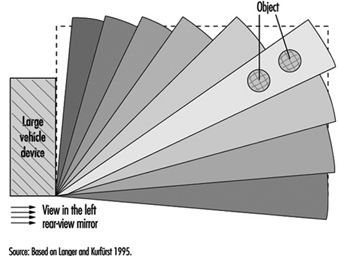
後方警告装置。 1985 年のハノーバー博覧会で、BAU は超音波センサーを使用して大型車両の背後の領域を確保する最初のプロジェクトの結果を示しました (Langer and Kurfürst 1985)。 ポラロイド™ センサーで作られたセンサー ヘッドの実物大モデルが、供給トラックの後ろの壁に設置されました。 図 4 は、その機能を概略的に示しています。 このセンサーの直径が大きいため、比較的小さな角度 (約 18°) の長距離クラブ型の測定領域が生成され、互いに隣接して配置され、異なる最大信号範囲に設定されます。 実際には、監視対象のジオメトリを任意に設定できます。このジオメトリは、センサーによって毎秒約 XNUMX 回スキャンされ、人の存在または侵入を検出します。 他の実演された後部警告システムには、いくつかの並列の個別のアレイセンサーがありました。
図 4. 測定ヘッドの配置とトラック後部の監視エリア
この鮮やかなデモンストレーションは、展示会で大成功を収めました。 業界団体の専門委員会などで、大型車両や設備の後方確保が各所で検討されていることが示された。 (ベルーフスゲノッセンスシャフト)、地方自治体の事故保険会社(地方自治体の車両を担当)、州の業界監督官僚、およびセンサーの製造業者は、自動車をサービス車両として考えていました(駐車システムに焦点を当てて保護するという意味で)。車体損傷)。 グループから引き出された後部エリア警告装置を促進する特別委員会が自発的に形成され、最初のタスクとして労働安全の観点からの要件リストの準備を行いました。 XNUMX 年が経過し、その間に後方監視で多くの作業が行われました。これはおそらく存在検出器の最も重要なタスクです。 しかし、大きなブレークスルーはまだありません。
多くのプロジェクトが超音波センサーを使用して実施されてきました。たとえば、丸太選別クレーン、油圧ショベル、特殊な地方自治体の車両、およびその他のユーティリティ ビークル、フォーク リフト トラックやローダー (Schreiber 1990) などです。 後部警告装置は、多くの時間バックする大型機械にとって特に重要です。 超音波存在検出器は、たとえば、ロボット マテリアル ハンドリング マシンなどの特殊な無人車両の保護に使用されます。 ラバー バンパーと比較して、これらのセンサーは検出領域が広く、機械と物体が接触する前にブレーキをかけることができます。 自動車用の対応するセンサーは適切な開発であり、要件が大幅に緩和されています。
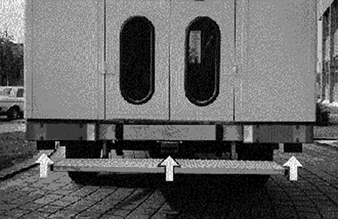
その間、DIN の輸送システム技術標準委員会は、標準 75031「後退中の障害物検出装置」(DIN 1995b) を作成しました。 要件とテストは、供給トラック用の 1.8 m と大型トラック用の 3.0 m (追加の警告エリア) の 3 つの範囲に設定されました。 監視領域は、円筒状の試験体の認識を通じて設定されます。 超音波センサーは、大雑把な作業条件を考えると、閉じた金属膜を備えている必要があるため、5 m の範囲は現在技術的に可能な範囲のほぼ限界です。 必要な監視ジオメトリは、1996 つ以上のセンサーのシステムでのみ達成できるため、センサー システムの自己監視の要件が設定されています。 図 75031 は、12155 つの超音波センサーで構成される後方警告装置を示しています (Microsonic GmbH 1994)。 同じことが運転室の通知装置と警告信号の種類にも当てはまります。 DIN 規格 XNUMX の内容は、国際技術 ISO レポート TR XNUMX、「商用車 - 後退中の障害物検出装置」(ISO XNUMX) にも記載されています。 さまざまなセンサー メーカーが、この規格に従ってプロトタイプを開発しました。
図 5. 後方警告装置を搭載した中型トラック (Microsonic 写真)。
まとめ
1970 年代初頭以来、いくつかの機関やセンサー メーカーが「存在検出器」の開発と確立に取り組んできました。 「後方警告装置」の特別な用途には、DIN 規格 75031 と ISO レポート TR 12155 があります。現在、ドイツポスト AG は主要なテストを行っています。 いくつかのセンサー メーカーは、それぞれ XNUMX 台の中型トラックにこのようなデバイスを装備しています。 このテストの肯定的な結果は、労働安全にとって非常に重要です。 最初に強調したように、必要な数の存在検出器は、言及された多くの応用分野における安全技術にとって大きな課題です。 したがって、機器、機械、材料の損傷、とりわけ、しばしば非常に深刻な人への傷害を過去のものにする場合、それらは低コストで実現可能でなければなりません。