Give me a ladder that is twice as stable, and I will climb it twice as high. But give me a cause for caution, and I’ll be twice as shy. Consider the following scenario: A cigarette is invented that causes half the frequency of smoking-related deaths per cigarette smoked as compared to present-day cigarettes, but in all other ways it is indistinguishable. Does this constitute progress? When the new cigarette replaces the current one, given that there is no change in people’s desire to be healthy (and that this is the only factor inhibiting smoking), smokers will respond by smoking twice as much. Thus, although the death rate per cigarette smoked is cut in half, the death risk due to smoking remains the same per smoker. But this is not the only repercussion: the availability of the “safer” cigarette leads fewer people to stop smoking than presently is the case and seduces more current non-smokers to yield to the temptation to smoke. As a consequence, the smoking-related death rate in the population increases. However, as people are willing to take no more risks with their health and lives than they see fit in exchange for the satisfaction of other desires, they will cut down on other, less appealing, unsafe or unhealthy habits. The end result is that the lifestyle-dependent death rate remains essentially the same.
The above scenario illustrates the following basic premises of risk homeostasis theory (RHT) (Wilde 1988; 1994):
The first is the notion that people have a target level of risk—that is, the level of risk they accept, tolerate, prefer, desire or choose. The target level of risk depends on perceived benefits and disadvantages of safe and unsafe behaviour alternatives, and it determines the degree to which they will expose themselves to safety and health hazards.
The second premise is that the actual frequency of lifestyle-dependent death, disease and injury is maintained over time through a closed-loop, self-regulating control process. Thus, fluctuations in the degree of caution people apply in their behaviour determine the ups and downs in the loss to their health and safety. Moreover, the ups and downs in the amount of actual lifestyle-dependent loss determine the fluctuations in the amount of caution people exercise in their behaviour.
Finally, the third premise holds that the level of loss to life and health, in so far as this is due to human behaviour, can be decreased through interventions that are effective in reducing the level of risk people are willing to take—that is, not through measures of the “safe cigarette” variety or other such efforts towards a “technological fix” of the problem, but by means of programmes that enhance people’s desire to be alive and healthy.
The Risk Homeostasis Theory of Accident Causation and Prevention
Among the many psychological contributions to the literature on occupational accidents and disease, traffic accidents and lifestyle-dependent ill health, only a relatively few deal with motivational factors in the causation and the prevention of these problems. Most of the publications deal with variables such as permanent or semi-permanent traits (e.g., gender, personality or experience), transient states (fatigue, blood-alcohol level), information overload or underload (stress or boredom ), training and skills, environmental factors and workstation ergonomics. It may be reasoned, however, that all variables other than motivational ones (i.e., those impinging upon the target level of risk) merely have a marginal influence upon the frequency of accidents per operator-hour of task execution. Some, though, may well have a favourable effect upon the accident rate per unit of productivity or per unit distance of mobility.
When applied, for instance, to road traffic, RHT posits that the traffic accident rate per time unit of road-user exposure is the output of a closed-loop control process in which the target level of risk operates as the unique controlling variable. Thus, in contrast with temporary fluctuations, time-averaged accident risk is viewed as independent of factors such as the physical features of the vehicle and road environment and of operator skills. Instead, it ultimately depends on the level of accident risk accepted by the road-user population in exchange for the perceived benefits received from motor-vehicle mobility in general (like driving a lot), and from specific risky acts associated with that mobility in particular (like driving well in excess of the average speed).
Thus, it is reasoned that at any moment of time, vehicle operators, equipped with their perceptual skills, perceive a certain level of accident risk and they compare this with the amount of accident risk they are willing to accept. The level of the latter is determined by the pattern of trade-offs between expected costs and benefits associated with the available alternatives for action. Thus, the target level of risk is that level of risk at which the overall utility of manner and amount of mobility is thought to maximize. The expected costs and benefits are a function of economic, cultural and person-related variables, and their long-term, short-term and momentary fluctuations. These control the target level of risk at any specific moment of time.
Whenever road users perceive a discrepancy between target risk and experienced risk in one direction or the other, they will attempt to restore the balance through some behavioural adjustment. Whether the balance is achieved or not depends upon the individual’s decision-making and psychomotor skills. However, any action taken carries a certain likelihood of accident risk. The sum total of all actions taken by the road users in a jurisdiction in a given time period (like 1 year), produce the frequency and severity of the traffic accidents in that jurisdiction. It is hypothesized that this accident rate has an influence (through feedback) upon the level of accident risk perceived by the survivors and thus upon their subsequent actions and subsequent accidents, and so forth. Thus, as long as the target level of risk remains unchanged, accident toll and behavioural caution determine each other in a circular causal chain.
The Risk Homeostatic Process
This homeostatic process, in which the accident rate is both consequence and cause of changes in operator behaviour, is modelled in figure 1. The self-correcting nature of the homeostatic mechanism can be recognized in the closed loop that runs from box e to box b, to box c, to box d, and then back to box e. It may take some time for people to become aware of a change in the accident rate (the feedback may be delayed, and this is symbolized by f). Note that box a is located outside the closed loop, meaning that interventions that lower that target level of risk can bring about a lasting reduction in the accident rate (box e).
Figure 1. Homeostatic model relating changes in accident loss to changes in operator behaviour and vice versa, with the target level of risk as the controlling variable
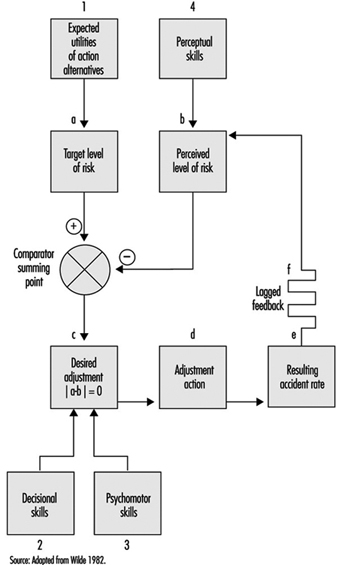
The process described herein can be further and quite clearly explained by another example of homeostatic regulation: the thermostatic control of the temperature in a house. The set temperature (comparable to box a) on the thermostat is at any point in time being compared with the actual temperature (box b). Whenever there is a difference between the two, there is a need for adjustment (box c), which triggers an adjustment action (i.e., the provision of colder or warmer air, box d). As a result, the air that is distributed through the house becomes colder (via air conditioning) or warmer (via heating—box e), as desired. After some time (symbolized by f) the air at the new temperature reaches the point set on the thermostat and gives rise to a new temperature reading, which is compared with the set-point temperature (box a), and so on.
The house temperature will show major fluctuations if the thermometer is not very sensitive. The same thing will happen when the adjustment action is slow to set in, either due to inertia of the switching mechanism or to a limited capacity of the heating/cooling system. Note, however, that these deficiencies will not alter the time-averaged temperature in the house. Note too that the desired temperature (analogous to box a in figure 1) is the only factor outside the closed loop. Resetting the thermostat to a new target temperature will produce durable changes in the time-averaged temperature. Just as a person chooses a target level of risk on the basis of the perceived benefits and costs of safe and risky behaviour alternatives, so is the target temperature selected in consideration of the pattern of expected costs and benefits of higher or lower temperatures (e.g., energy expenditures and physical comfort). A lasting discrepancy between target risk and actual risk can occur only in the case of consistent over- or under-estimation of risk, just as a thermometer that produces a temperature reading that is consistently too high or too low will cause real temperature to deviate systematically from target temperature.
Evidence in Support of the Model
It may be deduced from the model described above that the introduction of any accident countermeasure that does not alter the target level of risk is followed by road users making an estimate of its intrinsic effect upon safety—that is, the change in accident rate that would occur if operator behaviour did not change in response to the new countermeasure. This estimate will enter into the comparison between perceived and accepted level of risk and thus influence subsequent adjustment behaviour. If the initial estimates are incorrect on average, a disturbance in the accident rate will occur, but only temporarily, because of the correcting effect due to the feedback process.
This phenomenon has been discussed in an OECD report. The greater opportunity for safety and the increased level of skill may not be utilized for greater safety, but instead for improved performance: “Behavioural adaptations of road users which may occur following the introduction of safety measures in the transport system are of particular concern to road authorities, regulatory bodies and motor vehicle manufacturers particularly in cases where such adaptations may decrease the expected safety benefit” (OECD 1990). This report mentions numerous examples, as follows:
Taxicabs in Germany equipped with anti-lock brake systems were not involved in fewer accidents than taxis without these brakes, and they were driven in a more careless manner. Increases in lane width of two-lane highways in New South Wales in Australia have been found to be associated with higher driving speeds: a speed increase by 3.2 km/h for every 30 cm additional lane width. This was found for passenger cars, while truck speed increased by about 2 km/h for every 30 cm in lane width. A US study dealing with the effects of lane-width reduction found that drivers familiar with the road reduced their speed by 4.6 km/h and those unfamiliar by 6.7 km/h. In Ontario it was found that speeds decreased by about 1.7 km/h for each 30 cm of reduction in lane width. Roads in Texas with paved shoulders as compared to unpaved shoulders were driven at speeds at least 10% higher. Drivers have generally been found to move at a higher speed when driving at night on roads with clearly painted edge markings.
Recently, a Finnish study investigated the effect of installing reflector posts along highways with an 80 km/h speed limit. Randomly selected road sections which totalled 548 km were equipped with these posts and compared with 586 km that were not. The installation of reflector posts increased speed in darkness. There was not even the slightest indication that it reduced the accident rate per km driven on these roads; if anything, the opposite happened (Kallberg 1992).
Numerous other examples could be mentioned. Seat-belt-wearing legislation has not been seen to reduce traffic fatality rates (Adams 1985). Habitual non-users of seat-belts who were made to buckle up, increased their moving speed and decreased their following distance (Janssen 1994). Following the change-over from left- to right-hand traffic in Sweden and Iceland, there were initially major reductions in the occurrence of serious accidents, but their rates returned to the pre-existing trend when road users found out that the roads had not become as dangerous as they thought at first (Wilde 1982). There have been major reductions in the accident rate per km driven in the course of this century, but the traffic accident rate per head of population has not shown a downward trend (when account is taken of periods of high unemployment in which the target level of accident risk is reduced; Wilde 1991).
Motivation for Accident Prevention
Interestingly, most of the evidence for the phenomena that are postulated by RHT comes from the area of road traffic, while the prospects this theory holds for accident prevention have largely been confirmed in occupational settings. In principle, there are four ways in which workers and drivers may be motivated to lower their target level of risk:
- Reduce the expected benefits of risky behaviour alternatives.
- Increase the expected costs of risky behaviour alternatives.
- Increase the expected benefits of safe behaviour alternatives.
- Decrease the expected costs of safe behaviour alternatives.
While some of these approaches have been found to be more effective than others, the notion that safety may be enhanced by acting upon motivation has a long history, as is obvious from the universal presence of punitive law.
Punishment
Although enforcement of punitive law is one of society’s traditional attempts at motivating people towards safety, the evidence for its effectiveness has not been forthcoming. It suffers from several other problems as well, some of which have been identified in the context of organizational psychology (Arnold 1989).
First is the “self-fulfilling prophecy” effect of attribution. For example, labelling people with undesirable characteristics may stimulate individuals to behave as if they had these characteristics. Treat people as if they were irresponsible and eventually some will behave as if they were.
Second, the emphasis is on process controls; i.e., on specific behaviours such as using a piece of safety equipment or obeying the speed limit, instead of focusing on the end result, which is safety. Process controls are cumbersome to design and implement, and they can never totally encompass all undesirable specific behaviours of all people at all times.
Third, punishment brings negative side-effects. Punishment creates a dysfunctional organizational climate, marked by resentment, uncooperativeness, antagonism and even sabotage. As a result, the very behaviour that was to be prevented may in fact be stimulated.
Encouragement
In contrast to punishment, incentive programmes have the effect for which they are intended, as well as the positive side-effect of creating a favourable social climate (Steers and Porter 1991). The effectiveness of incentives and recognition programmes in enhancing safety has been clearly established. In a recent review of over 120 published evaluations of different types of occupational accident prevention, incentives and recognition were generally found more effective towards safety than engineering improvements, personnel selection and other types of intervention which included disciplinary action, special licensing, and exercise and stress-reduction programmes (Guastello 1991).
Behavioural Adaptation
According to risk homeostasis theory, the accident rate per person-hour of task performance or the annual accident rate per head of population do not primarily depend upon a person’s ability to be safe, nor upon the opportunity to be safe, but instead upon that person’s desire to be safe. Thus, it is reasoned that, although education and engineering may provide the ability or the opportunity for greater safety, these approaches to accident prevention will fail to reduce the accident rate per hour, because they do not reduce the amount of risk people are willing to take. The response to these interventions, therefore, will usually take the form of some behavioural adjustment in which the potential safety advantage is in fact consumed as an addition to performance in terms of greater productivity, more mobility and/or higher speed of mobility.
This can be explained as the consequence of a homeostatic control process in which the degree of behavioural caution determines the accident rate and the accident rate determines the extent of caution in operator behaviour. In this closed-loop process, the target level of risk is the only independent variable that ultimately explains the accident rate. The target level of risk depends on the person’s perception of the advantages and disadvantages of various action alternatives. To maintain that safety is its own reward is to ignore the fact that people knowingly take risks for various contingencies that are open to modification.
Therefore, of all accident countermeasures that are currently available, those that enhance people’s motivation towards safety seem to be the most promising. Furthermore, of all countermeasures that affect people’s motivation towards safety, those that reward people for accident-free performance seem to be the most effective. According to McAfee and Winn’s literature review: “The major finding was that every study, without exception, found that incentives or feedback enhanced safety and/or reduced accidents in the workplace, at least in the short term. Few literature reviews find such consistent results” (1989).
Summary
Of all possible schemes that reward people for accident-free performance, some promise better results than others because they contain the elements that appear to enhance motivation towards safety. Examples of empirical evidence for the risk-homeostatic process have been selected from the larger information base (Wilde 1994), while the ingredients for effective incentive programming have been discussed in greater detail in Chapter 60.16. The under-reporting of accidents has been mentioned as the only identified negative side-effect of incentive schemes. This phenomenon, however, is limited to minor accidents. It may be possible to conceal a broken finger; it is more difficult to hide a corpse.